
A Note on Spirals and Curvature
- DOI
- 10.2991/gaf.k.200124.001How to use a DOI?
- Keywords
- Spirals; pseudo-Chebyshev functions; curvature; Lamé curves; Antonelli metrics
- Abstract
Starting from logarithmic, sinusoidal and power spirals, it is shown how these spirals are connected directly with Chebyshev polynomials, Lamé curves, with allometry and Antonelli-metrics in Finsler geometry. Curvature is a crucial concept in geometry both for closed curves and equiangular spirals, and allowed Dillen to give a general definition of spirals. Many natural shapes can be described as a combination of one of two basic shapes in nature—circle and spiral—with Gielis transformations. Using this idea, shape description itself is used to develop a novel approach to anisotropic curvature in nature. Various examples are discussed, including fusion in flowers and its connection to the recently described pseudo-Chebyshev functions.
- Copyright
- © 2020 The Authors. Published by Atlantis Press SARL
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. INTRODUCTION
Spirals are among the most intriguing curves in mathematics, with a clear relevance for the natural sciences. There are many different spirals, and one century ago Gino Loria, whose Storia delle matematiche is a treasure trove for knowledge and understanding of planar curves [1], wrote:
The word ‘spiral’, which we used on the preceding pages, goes back to the most distant of ancient times, meaning a path in the astronomical system of Plato, but the corresponding general concept has not yet attained that degree of precision, which a mathematical concept requires; For the time being, we want to refer to spirals as all curves whose simplest and most appropriate analytical representation is obtained in polar coordinate application.
Looking beyond the analytical representation of spirals, many links to other classical curves are possible. In Section 2, we focus on three different groups of spirals defined using equations. The equations in polar coordinates have their specific counterparts in Cartesian coordinates, and several examples will be discussed in Section 3. A differential geometrical approach leads to a general definition of anisotropic curvature in Section 4 and applications.
2. THREE CLASSES OF SPIRALS
2.1. Power Law Spirals
This family of spirals is defined as [2] (Table 1):
| m, n |
|
General spiral |
|---|---|---|
| m = 1, n = 2 |
|
Fermat spiral |
| m = 1, n = 1 | ρ = aθ1 | Archimedes spiral |
| m = −1, n = 1 | ρ = aθ−1 | Hyperbolic spiral |
| m = −1, n = 2 |
|
Lituus |
Power law spirals and some special cases
2.2. The Logarithmic or Bernoulli Spiral
This spiral is defined as [3]:
For a = 1, b = en, we have ρ = enθ
In complex form [3]
ρ = ρ1 + iρ2 with
For n = 1; θ = π we have Euler’s identity, namely
For any odd integer n = 2k + 1, einπ = −1 or eiπn + 1 = 0
For all even integers n = 2k, einπ = +1 or eiπn − 1 = 0
A summation can also be used. For
2.3. Sinusoidal Spirals
Sinusoidal spirals are defined as
|
|
|||
|---|---|---|---|
| n = 1/2 | Cardioid | n = −1/2 | Parabola |
| n = 1 | Circle | n = −1 | Line |
| n = 2 | Lemniscate of Bernoulli | n = −2 | Equilateral hyperbola |
Some special cases [2]
3. SPIRALS AND METRICS
3.1. Spirals, Classical Curves and Special Polynomials
From Section 2, we have the following relationships:
This corresponds to the classical curves y = xa or y = ax, i.e. y = f (x) is either a variable raised to a fixed power, or a fixed number raised to a variable power. The third one is directly related to Chebyshev polynomials [3,4].
3.2. Logarithmic and (Co)sinusoidal Spirals and Chebyshev Polynomials
For
Chebyshev polynomials of the second kind are defined as:
It follows that both (co-)sinusoidal spirals ρn = am cos nθ and the logarithmic or Bernoulli spirals ρ = einθ = cos nθ + i sin nθ with
They are of the first kind Tn(x) for u0 = 1; u1 = x, and of the second kind Un(x) for u0 = 1; u1 = 2x. Fibonacci numbers Fn arise for a = b = 1; u0 = 0; u1 = 1. For a = b = 1; u0 = 2; u1 = 1, we obtain Lucas numbers Ln. Therefore, if in Chebyshev polynomials
3.3. Power Law Spirals and Inequalities
The motivation for the name power law spirals is that the general form is a polar form of a classical power law
Superparabola’s have n > 1, curving upward, and subparabola’s have n < 1. Logarithms turn all super or subparabola’s into straight lines. In ancient Greek mathematics, the parabola is closely related to the geometric mean
Two variables (x, y) raised to the same or different powers, can be added or multiplied (Table 3) [4]. In the case of addition, one has Lamé curves or superellipses [4–7] in the case
| Variable x, power n, m | Means | Planar curve | Applications |
|---|---|---|---|
| xn + yn | Arithmetic | Superellipses (Figure 1) | Lamé curves |
| Minkowski distances | |||
| xn = ym | Geometric | Superparabolas | Power laws |
| Superhyperbolas |
Conic sections at the core, once more [4]
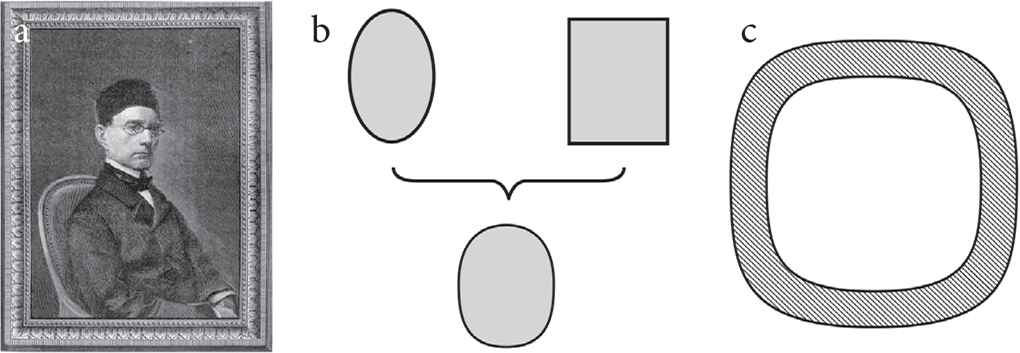
(a) Gabriel Lamé, (b) superellipses as optimal solutions, combining advantages of ellipse and rectangle, (c) cross section of square bamboo [4]
Addition is related to the arithmetic mean and multiplication to the geometric mean. Arithmetic and geometric means are found in every corner of mathematics and applied mathematics, in fundamental inequalities, such as the strict inequality
The Gaussian curvature is K = κ1 · κ2 (the square of GM) and the mean (or Germain) curvature is the arithmetic mean
3.4. From Lamé Curves to Antonelli-metrics
The definition of classical means is also directly related to the measurement of distances. Lamé curves (Table 3) introduce anisotropy whereby lengths depend on the direction via Lamé curves, giving rise to the simplest Minkowski distances, with the classic Euclidean distance for n = 2 [7]:
For distances there are two equally valid viewpoints, namely an internal and an external one. In superellipses in the 45° direction, the distance from the origin is either longer than in the 0° or 90° direction, when viewed with Euclidean glasses, or of the same length, when the supercircle is considered as a unit circle for the given Minkowski metric [4].
In ecology the Antonelli–Shimada metric [8] was introduced, which is the Finsler metric F = eϕ · L with L the p-th root metric of Minkowski (for integer p ≥ 3). This metric is used to study seismic wave propagation [9] in the framework of Finsler geometry. In
The nature of wave propagation is explained by Huygens’ principle, where the envelope of the elementary wavefronts constitute a new wavefront, but in this anisotropic case the source point is not a point of minerals, but of a domain of rocks as a collection of minerals. For the seismic Finsler metric, the anisotropy of ray velocity is given by [9]:
This particular expression of Lamé curves in polar coordinates led to Gielis transformations [ Eq. (15)] originally introduced in Gielis [11]. It transforms a function f(θ), such as the above spirals or a constant function, such as R, the radius of a circle. This gives a stretchable radius or position vector. Equation (15) with m = 4, and p = n1,2,3 is Eq. (14).
4. FROM POSITION VECTOR TO ANISOTROPIC CURVATURE
4.1. The Position Vector and the Equiangular Spirals
Two strong points of the polar coordinate system are (1) growth or development from one pole, and (2) the direct use of the position vector, one of the most important quantities in physics [12]. With the position vector curves can be defined kinematically. The catenary for example is the curve that the focus of a parabola traces, when this parabola is rolled without slipping on a straight line. Actually, the profile curves of all constant mean curvature surfaces (H = constant) can be obtained by rolling conic sections without slipping over a line, a fact proved by Delaunay [7].
In the plane, with constant vector length a circle is traced out, even if the rotation is continued for any number of cycles. In general, the length of the vector can change, monotonically, periodically or a combination of both. If the length increases with constant velocity, the result is the spiral of Archimedes. If the lengthening is by a constant acceleration, the result is the logarithmic or equiangular spirals [3] with the remarkable property that during growth the size changes, but not the form: Eadum mutata resurgo is the epitaph of Bernoulli.
The equiangular spiral can further be characterised as follows [13]:
As is well known, the equiangular spirals, i.e. the curves Γ in
Since the direction of the tangent fixes the direction of the normal, these conditions can also be expressed in terms of the normal direction.
Let
The equiangular spirals can also be characterised is in terms of grad ρ [13]:
Since for a general curve ρ(θ) in
Hence
4.2. Constant Ratio Submanifolds
One of the quintessential examples of logarithmic spirals in nature is the shell of Nautilus. For the logarithmic spiral one finds that the force which makes a Nautilus shell grow can be decomposed into growth in length and width [12,13]. When considering a planar form as a result of growth, the constant ratio between the resolvents of the force of growth “in length and in width” (Figure 2), or between the radial component of growth and the component of growth in the direction perpendicular to the radial one, may be considered as one of the most natural laws of natural growth [12,13].
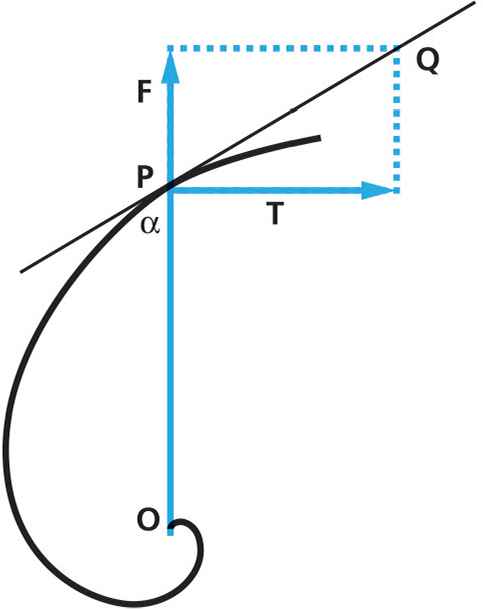
Components in logarithmic spiral [11]
This constant ratio aligns with contemporary differential geometry, which focuses strongly on submanifolds. A submanifold is a manifold immersed or embedded in another manifold, of the same or higher dimension. A square inscribed in a circle is one example (or any two Lamé curves); another one is a soap bubble floating in the air is a submanifold in a larger environment, called air. In general, such submanifolds have a constant ratio between the tangential xT and normal component x⊥ of position vector x. The submanifold is said to be of constant ratio if the ratio
4.3. Spirals as Functions of Curvature and Arc Length
The curvature might also be interpreted as tension from within and tension induced by the surroundings. For this we need to look at spirals from the point of view of their curvature
In general, plane curves whose curvature is a polynomial function of the arc length s are called polynomial spirals [14,15]. These spirals can be called Dillen-spirals, in honour of Franki Dillen (1963–2013). These polynomial spirals were a by-product of his classification of hypersurfaces Mn of the (n + 1)-dimensional Euclidean space
For planar curves, if s goes to infinity the curvature function also goes to infinity. Since the curvature functions determines the curves up to an isometry (the fundamental theorem of Euclidean geometry), every spiral γ can be written as:
The curvature
- •
For k = 0, γ is a straight line.
- •
For k = 1, γ is a circle.
- •
For k = 2, γ is a Cornu spiral or chlotoid, a curve used by Cornu in 1874 in study on diffraction. Equation (17) has the Fresnel integral Pk (t) = t2 as special case and is already found in Bernouilli’s Opera [14,15].
- •
For k = 3, there are infinitely many non-similar curves. For κ = s2 – D, with
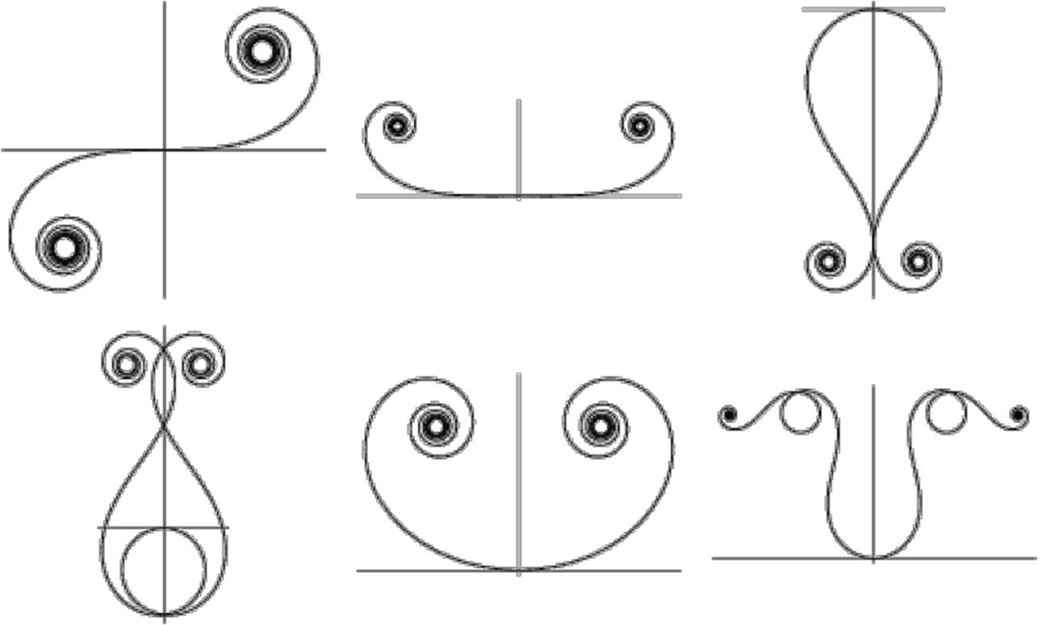
Dillen spirals
The measure of tension created in curves by their very shape as they evolve in terms of the polar angles is by X″, the angular curvature vector. ||X″|| = [(ρ″ – ρ)2 – 4ρ′2)]1/2 or rather its converse, gives a numerical measure of this angular tension [13]. This results from X″ (θ) = [ρ″ (θ) – ρ (θ)] · (cos θ, sin θ) + 2ρ′ (θ) · (−sin θ, cos θ).
4.4. Circle and Spirals: With or against the Flow
Curvature allows for the following characterisation of circle and logarithmic spiral as two curves with opposite tendency; which explains why these two curves are fundamental in the natural sciences. The second derivative describes the tension in the curve giving two possible opposites: Either position vector and tension vector are parallel X || X″, or they are orthogonal X ⊥ X″ ⇔ X · X″ = 0. The way of least resistance, growing in the direction parallel to the tension (circle) or the shape will resist the tension, growing in a direction perpendicular to the tension (a logarithmic spiral).
For a curve with parametrization X (θ) = (ρ (θ) cos θ, ρ (θ)sin θ), we have [16]:
X (θ) is the position vector and X″ (θ) the acceleration or tension vector, a measure for the tension in the curve. Two conditions are considered, which give the two most natural geometrical shapes in nature: the circle and the logarithmic spiral [13].
Condition 1: Position vector || to curvature vector: (X || X″) if the vector product equals zero. This condition translates as going with the flow, to align with the stress. For vectors in
The solution is ρ′ = 0 or ρ = constant, which is a circle.
Condition 2: Position vector ⊥ to curvature vector: (X ⊥ X″) if the scalar product equals zero. This condition translates as going against the flow, to oppose the stress
For ρ (θ) ≠ 0: ρρ″ – ρ2 = 0 or ρ″ = ρ. This is a family of solutions ρ (θ) = c1eθ + c2e−θ, with c1,2 constants. For X (0) = (a, 0) and X′ (0) = (a, a), then c1 + c2 = a, c1 – c2 = a, so c1 = a, c2 = 0, which gives ρ (θ) = aeθ.
Descartes searched for a curve for which in each point the position vector makes a fixed angle with the tangent vector. The parametrization X(θ) with ρ(θ) = aeθ satisfies this condition, since
5. CURVATURE IN NATURAL SHAPES AND PHENOMENA
5.1. Anisotropic Curvature
Curvature is based on a point-wise approximation of a curve with a circle as in Sections 4.3 and 4.4. The radius of this circle is collinear with the normal to the curve. This goes back to Nicolas Oresme [17] and is the foundation of almost all of our scientific methods. It is a local operation and the only curve to which the circle is osculating globally (i.e. at each point on the curve a circle can be fitted of the same size) is the circle itself. This is based on the Pythagorean Theorem. Equation (15) however is a generalisation of the Pythagorean Theorem; indeed for all exponents m = 4, n1,2,3 = 2, A = B = 1 the transformation equals 1 and describes a circle. Lamé curves are defined for m = 4, n1,2,3 = n, or for m = 4, n1 = p, n2,3 = q [4,11,18].
Hence, the structure of Eq. (15) can be considered as Pythagorean-compact [4], and the resulting curves are unit circles. If measured against a classic circle, the radius stretches or shortens as a function of the angle, but if measured as its own, internal frame, the radius is constant (see Section 3.4). In the first case we have a variant of the classic Hooke’s Law F = kx, with force F and spring constant k (the external view point). In the second case however, x is a constant (radius of a unit circle) and the spring constant is variable k = f(x) defined by Eq. (15) (the internal view point). It is the point of view that matters, whether measurements are taken internally (unit circle) or from the outside, with a Euclidean ruler.
A most natural question to ask is if the internal measurements can be taken as a measure of curvature. This would mean that any shape defined by Eq. (15) for f (θ) constant with the classic unit circle for f (θ) = 1, can be approximated exactly by the shape itself [4]. In Figure 4a the classical Euclidean rotational symmetry is shown, whereby red and green starfish are rotated relative to each other and do not overlap. In Figure 4b a green starfish coincides with its totally osculating curve, the red starfish. In Figure 4c a chain of balls rolls around the curve. The shortest way for the chain to roll around the starfish curve is tracking the curve precisely along its perimeter, and the chain is then osculating, and everywhere or totally osculating when the chain becomes infinitely thin. In other words, rotating the red starfish of Figure 4a relative to the green one, it should follow the geometry of the space as in Figure 4b or the chain in Figure 4c.
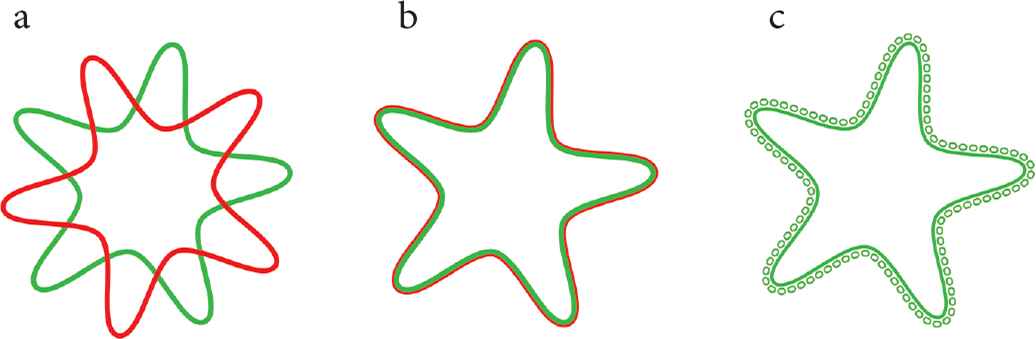
(a) Classical rotational symmetry of a starfish. (b) A starfish (green) with its totally osculating starfish (red), and (c) chain along a starfish [4]
The original shape and the curvature shape then become one and the same and are totally osculating. This may seem trivial but this same procedure has been at the core of science for many centuries with the classic Euclidean circle in Oresme’s tradition. Analogous to the classic definition of curvature
As in the case of circles, the curvature is the inverse of the curve (unit circle) itself. Also, the transformations are Pythagorean compact and expressed in classical trigonometric functions. Moreover, each shape has its associated trigonometric functions and its dedicated half-length πL or πGT (which themselves can be expressed in terms of classical trigonometric functions). Eqs. (15), (21) and (22) can also be rewritten in terms of Chebyshev polynomials [4].
Curvature is the most important invariant of form and shape in science and mathematics. Using κGT not only allows for a precise (Pythagorean compact) description, but also the study of the evolution of curvatures. The Euclidean toolbox of transformations can be extended with Gielis tranformations.
5.2. Anisotropic Curvature in Natural Shapes
The main advantage of Eqs. (15), (21) and (22) in combination with Section 4.4, is that a shape can be split into one of two basic function (circle and spiral as basic shapes in nature) (Figure 5) and the specific Gielis transformation, which then defines the shape-specific curvature. The shape specific curvature can then directly inform us about the preferred anisotropic directions (as changes in the length of the position vector) if we consider anisotropy as deviation from Euclidean perfection (related to classical differential equations).

Transformations on basic shapes circle and spiral [7]
From an intrinsic or internal geometrical point of view the shapes are isotropic, with the same unit distance in all directions. Examples are given below for circles, Rhodonea curves and for the logarithmic spiral. All are expressed in polar coordinates following Loria’s definition in Section 1. A circle is a spiral with constant radius vector. It is also a spiral in the sense of curvature in function of arc length, since for k = 1 in Eq. (17), γ is a circle.
As first example, Figure 6 displays tree rings in oak, cedar and teak (Tectona grandis). Teak is notable for having square young stems and branches, which is reflected in tree rings in the early years (Figure 6a). In later years the annual tree rings are either getting more round, or in lower parts of the trunk, align with the anchoring system of the tree, e.g. oak (Figure 6b). Square sections can be found regularly in stems of Thuja occidentalis (Figure 6c). Annual tree rings reflect both the inherent anisotropy (building upon what is already there) and the influences of the year in which particular tree rings were built. Obviously, one can clearly separate the basic function circle and the anisotropy given by Eq. (15), with Lamé curvature κL defined by Eq. (21).
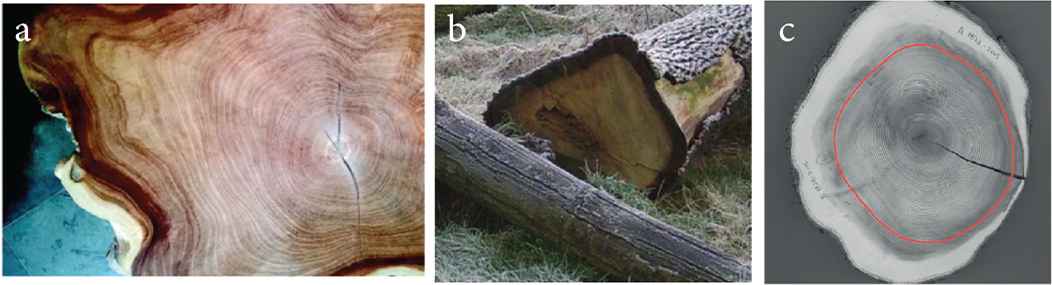
Tree rings in (a) teak, (b) oak, and (c) white cedar [4]
A second example are Rhodonea curves as sinusoidal spirals for ρ = cos nθ or ρ = sin nθ (Section 2.3). When these Rhodonea curves are subject to transformations by Eq. (15), flowers in Figure 7 lower row result. These can be considered as classical Euclidean rose or Rhodonea curves, forced or constrained to grow inside predefined polygons in Figure 7 upper row. In fact, such constraining can clearly be observed in the earliest stages of development in flowers [4].
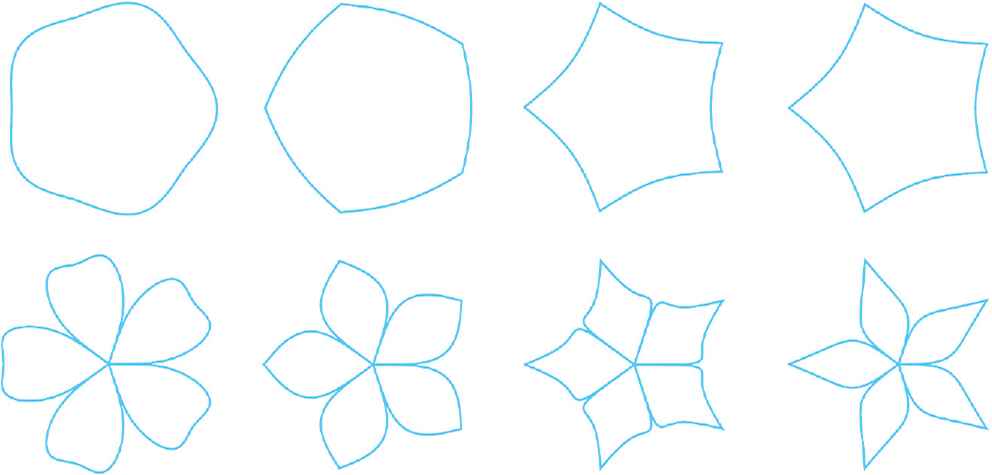
Flowers of Geranium, strawberry, Nicotiana and the corresponding Gielis polygons (upper row) [19]
These flowers are defined by Eq. (23) with parameter values in Table 4. They are directly related to the trigonometric functions associated with the m-polygons in the upper row of Figure 7, which are defined by Eq. (15).
| n1 | 3 | 3 | 1 | 1 |
| n2,3 | 3 | 1 | 1 | 1 |
| n4 | 3 | 3 | 5 | 2 |
Parameter values for flowers in Figure 7; m = 5 in all cases
Their expression using m/2 in itself is interesting, since this can be rewritten in terms of the recently defined pseudo-Chebyshev functions with T(1/2) (x) = cos [(1/2) arccos x] and T(k + 1/2) (x) = cos [(k + 1/2) arccos x] [3,20]. This means that not only the curvature of the polygons can be defined as κGT by Eq. (22), but also the curvature of the associated trigonometric functions.
As third example, shells of snails and Nautilus can be described as spirals with ρ (θ) = a · ebθ. In most molluscs and ammonoids however, the length of the radius vector varies periodically (at least from the “Euclidean” point of view). For a = f (υ) defined by Eq. (15), we obtain Figure 8b, which is reflected in Trapezium horse conch (Figure 8a) and ammonoid like shells (Figure 8c). Once more, the Euclidean function can be separated from its curvature part κGT. In a wide variety of natural shapes, these transformations and curvatures describe both deviations from Euclidean perfection, and highlight the intrinsic anisotropy, which is imposed from the earliest stage of development.
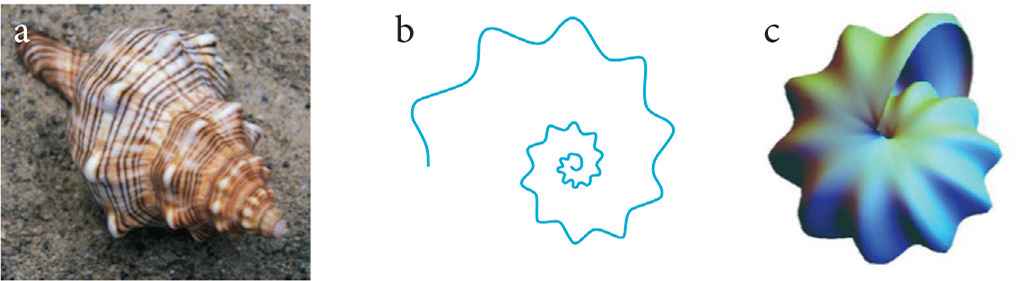
(a) Trapezium horse conch. (b and c) Logarithmic superspiral
Further examples are the Antonelli–Shimada metric and the seismic Finsler metric (14) with Lamé transformations κL on the basic functions: the m-th root metric of Minkowski in the first case, and n1,2,3 = n, m = 4 in Eq. (15) in the second. The final example is the extension of the class of constant mean curvatures (CMC) (plane, cylinder, sphere, catenoid, undoloid and nodoid) to constant anisotropic mean curvatures (CAMC) surfaces [21]; they acquire shapes that are observed in e.g. snowflakes [4].
6. SPECIAL FUNCTIONS AND OCCAM’S RAZOR
Special polynomials, in particular Chebyshev polynomials, are involved in almost every aspect of this paper. They appear in the logarithmic spiral, giving rise to pseudo-Chebyshev functions, and Eq. (15) can be rewritten in terms of Chebyshev polynomials of first and second kind. The Lamé curves and circles are special cases. By defining the anisotropic curvature in terms of Eq. (15), both shape description and anisotropic curvature can be written as Chebyshev polynomials, or in certain cases as pseudo-Chebyshev functions, as in the flowers (Figure 7).
Equation (15) and its generalizations to spherical and cylindrical coordinates have been successfully used to extend the use of the Fourier projection method for solving boundary value problems involving the Laplacian and under different boundary conditions (Dirichlet, Neumann, Robin) on 2D and 3D domains, including Riemann surfaces and shells [22–25]. The solution could be expressed in terms of ρ (θ) and a Fourier series, invoking Bessel and Legendre functions depending on the problem. Key was the generalization of the Laplacian morphing any normal polar domain into a circular domain (and vice versa). Laplace equations (whose solutions are harmonic functions) and Helmholtz equations (its solutions are metaharmonic functions) appear everywhere in mathematical physics, and we now have one coherent strategy, based on the original Fourier projection method, to solve boundary value problems in a very wide range of domains. In the spirit of the current paper: the Laplace operator of any curve Γ in
Equation (15) is Pythagorean-compact [4]. For specific values of m and n, Lamé curves result and circles when the transformation is equal to one (for m = 0, or for n = 2 for any m, given that A = B). Moreover, this representation is topologically simple in the sense of Arnold and Oleinik [4]. Lamé curves for example are trinomials, a summation of monomials in pure variables.
This Pythagorean compact nature can be exploited further: the ■ and ∴ in Eq. (24) can be substituted for by variables or functions. In Chacón [26], Jacobian Elliptic functions were proposed for ■, and Eq. (24) was further generalised in Gielis et al. [27], with e.g. sums of trigonometric functions. It can be tightly woven into the existing framework of mathematical physics and the natural sciences, as 21st century generalization of Pythagoras and as the most compact description in the sense of Occam’s Razor.
As an extremely compact shape descriptor (a generalization of Pythagoras and conic sections) and in its new role describing anisotropic curvature to study natural forms and their growth and evolution, this Pythagorean compact formulation, complements the common methods in mathematical analysis of (1) infinite series (Taylor, Euler, Bernoulli, Bell, Fourier, Bessel, Legendre….), or (2) finite series, such as partial versions of the above or Chebyshev polynomials; these share a common descent with the description of natural shapes [5].
CONFLICTS OF INTEREST
The authors declare they have no conflicts of interest.
REFERENCES
Cite this article
TY - JOUR AU - Johan Gielis AU - Diego Caratelli AU - Peijian Shi AU - Paolo Emilio Ricci PY - 2020 DA - 2020/02/23 TI - A Note on Spirals and Curvature JO - Growth and Form SP - 1 EP - 8 VL - 1 IS - 1 SN - 2589-8426 UR - https://doi.org/10.2991/gaf.k.200124.001 DO - 10.2991/gaf.k.200124.001 ID - Gielis2020 ER -