
Asymptotics behavior for the integrable nonlinear Schrödinger equation with quartic terms: Cauchy problem
- DOI
- 10.1080/14029251.2020.1819605How to use a DOI?
- Keywords
- Integrable nonlinear Schrödinger equation with quartic terms; Long-time asymptotics; Nonlinear steepest descent method
- Abstract
We consider the Cauchy problem of integrable nonlinear Schrödinger equation with quartic terms on the line. The first part of the paper considers the Riemann-Hilbert formula via the unified method(also known as the Fokas method). The second part of the paper establishes asymptotic formulas for the solution of initial value problem using the nonlinear steepest descent method(also known as the Deift-Zhou method).
- Copyright
- © 2020 The Authors. Published by Atlantis Press and Taylor & Francis
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. Introduction
The long-time asymptotics of initial value problem of integrable nonlinear evolution equations can be analyzed by means of the nonlinear steepest descent method introduced by Deift and Zhou [19]. In the context of initial value problems, the Riemann-Hilbert (RH) problem is formulated on the basis of certain spectral functions whose definitions involve the initial data of the solution [3, 40]. In this way, the long-time asymptotics for the solutions of decay initial value problem of the mKdV equation and the Schrödinger equation were analyzed respectively by Deift, Its and Zhou [17, 19]. This method developed by several authors [18, 27] and has already been used for:
- (a)
For the integrable equation with 2 × 2 spectral problem (i.e., 2 × 2 Lax pair);
- (i)
- (ii)
- (iii)
- (iv)
- (v)
- (b)
For the integrable equation (system) with 3 × 3 spectral problem (i.e., 3 × 3 Lax pair);
- (i)
- (ii)
Decay initial boundary value problem: Degasperis-Procesi equation [9].
The aim of this paper is to analyze long-time asymptotics for the initial value problem of the integrable nonlinear Schrödinger equation with quartic terms(NLSQ),
The zero-curvature equation reproduces the following equation,
If we take r = − q*, then the equation (1.5) can be write as (1.1a).
Our main results are shown in Section 2. They state in the form of two theorems (Theorem 1–2). Theorem 2.1 is concerned with the construction of solutions of the initial value problem, and the proof relies on the RH techniques(also call Fokas method). Section 3 is devotes to Theorem 2.2. The proof is based on the nonlinear steepest descent approach of the Deift and Zhou [19].
2. Main results
The first theorem presents how to get the solutions of (1.1) can be constructed starting from the reflect coefficient function r(λ). Let 𝒮 (ℝ) denote the Schwartz class of smooth rapidly decaying functions.
Theorem 2.1
(Construction of solutions). Suppose r(λ) ∈ 𝒮 (ℝ). Define the 2 × 2-matrix valued jump matrix J(x, t, λ) by
Then the 2 × 2-matrix RH problem
-
M(x,t,λ) is analytic in λ ∈ ℂ \ ℝ.
-
The boundary value M±(x, t, λ) at ℝ satisfy the jump condition
-
Behavior at ∞
has a unique solution for each (x,t) ∈ ℝ2 and the limit limλ→∞(λ M(x,t,λ))12 exists for each (x,t) ∈ ℝ2. Moreover, the function q(x, t) defined byis a smooth function of (x,t) ∈ ℝ2 with rapid decay as |x| → ∞ which satisfies the integrable nonlinear Schrödinger equation with quartic terms (1.1) for (x, t) ∈ ℝ2.
Proof.
See Section 3.
The second theorem gives the long-time asymptotics of the solutions constructed in Theorem 2.1 in the sector
Theorem 2.2.
Assuming
In the region 0 < max{|λ0|, |λ1|, |λ2|} < M, M is a positive constant. Where λ0, λ1, λ2 are three stationary points of phase function which defined in (4.1).
Proof.
See Section 4
3. The proof of Theorem 2.1
In this part, we only give a sketch how to prove Theorem 2.1 from the inverse scattering transformation of NLSQ equation.
We extend the column vector ψ to a 2 × 2 matrix and letting
In order to formulate a RH problem for the solution of the inverse spectral problem, we seek solutions of the spectral problem which approach the 2 × 2 identity matrix as λ → ∞.
Throughout this section, assuming that q(x,t) is sufficiently smooth. Defining two solutions of (3.1a) and (3.1b) by
This choice implies following,
It means that we can write Ψj as:
It can be shown that the second column of Ψj is bounded and analytic in the following domain:
According to the ordinary differential equation theory, it follows that the two solutions of (3.1) have linear relations,
It is easy to show that the following symmetry for Ψ(x,t,λ):
The symmetry implies as follows,
Taking the sectionally meromorphic function M(x,t,λ) defined by
By the analytic conditions of Ψ1,Ψ2,a(λ). It means that the function M(x, t, λ) is well-defined, and (3.3) can be rewritten as
Remark 3.1.
Noticing that the jump matrix J(λ) in (2.1) is Hermite and positive. By the Zhou’ law [41], we can get the vanishing lemma for the Riemann-Hilbert problem M(x, t, λ). It means that the associated homogeneous RH problem has only the zero solution. In other wards, the solution of Riemann-Hilbert problem exists.
Substituting the asymptotic expansion
Hence one can get D = 𝕀.
Inserting into the off-diagonal elements of (3.5), we can get
-
M(x,t,λ) is analytic in λ ∈ ℂ \ ℝ.
-
The boundary value M±(x, t, λ) at Σ satisfy the jump condition
-
Behavior at ∞
Lemma 3.1.
Define q(x, t) by (2.2), then
Proof.
We can use the Foaks method and the dressing method to prove the lemma. The argument is analogous to that Lemma 4.1 in [25], so the proof will be omitted.
The compatibility condition of (3.7) shows that q(x, t) satisfies (1.1a). The proof of Theorem 2.1 is complete.
4. The proof of Theorem 2.2
In order to analyze the long-time behavior of the solution of the NLSQ equation, first we should split the jump matrix into an appropriate upper/lower triangular form which can help us to localize the problem to the neighborhood of the stationary point. An appropriate rescaling then reduces an oscillatory RH problem to a RH problem with constant coefficients, which can be solved explicitly in terms of classical functions.
4.1. The augmented RH problem
We begin with the decomposition of the complex λ-plane according to the signature of the real part of the phase of the conjugating exponential of the oscillatory RH problem, Re(2itθ(λ)), where
Assuming x/t := ξ satisfies the inequality,
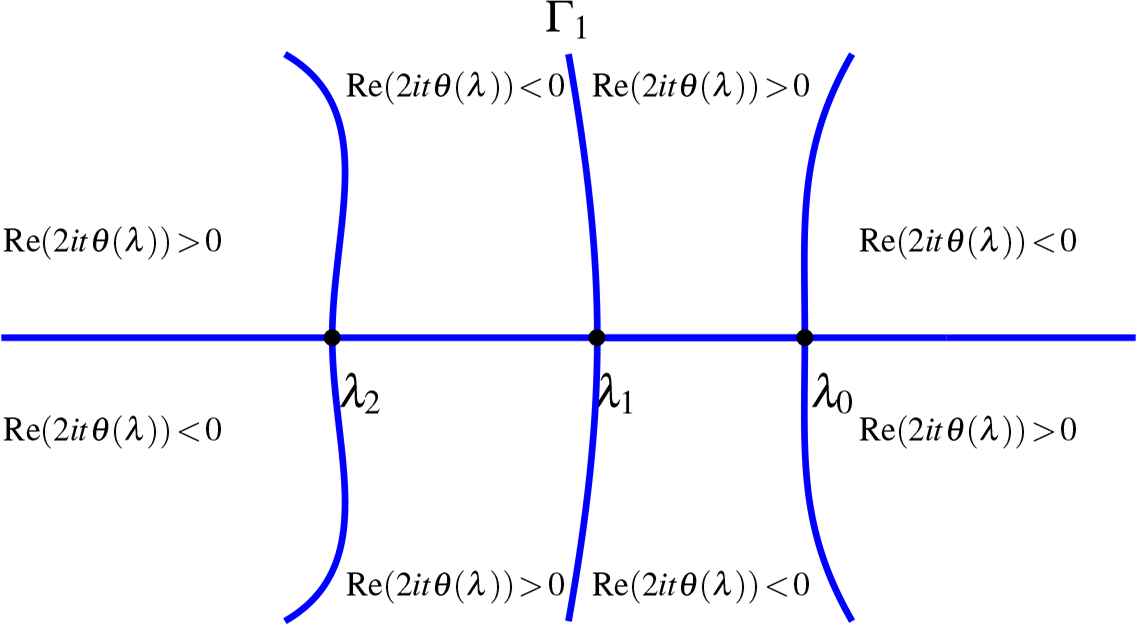
The signature of Re(2itθ (λ))
The main purpose of this section is to reformulate the original RH problem (Lemma 2.1) as an equivalent RH problem (see Lemma 4.1) on the augmented contour Σ (see Figure 2),
Augmented contour Σ.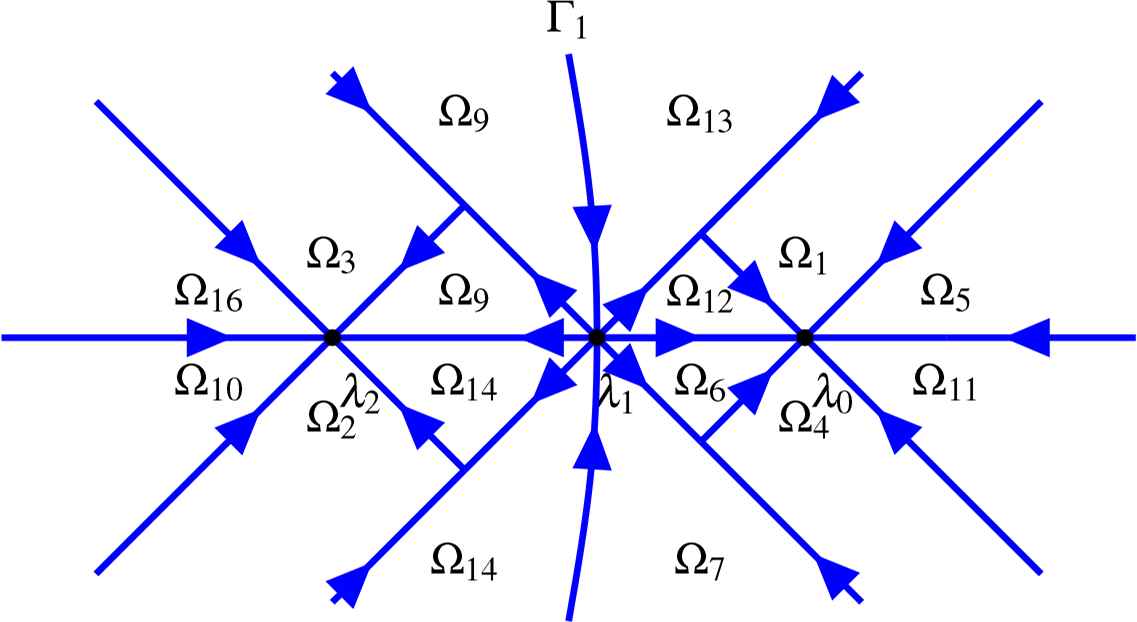
In order to define the conjugation matrices on Σ and exploit the analyses in [3, 19], we need to formulate two technical propositions: the first concerns the triangular factorisation of the conjugation matrices of the original RH problem (3.6), and the second pertains to a special decomposition for the reflection coefficient r(λ). The jump matrices (3.6) have following form,
In order to eliminate the diagonal matrix between the lower/upper triangular factors in (4.3), by the scheme in [19], introduce the function δ (λ) which solves the scalar RH problem:
According to the Plemelj formulae, it is straightforward to show that the solution of RH problem (4.4) is given by
Proposition 4.1.
Let
Then the conjugates
Proof.
The argument is analogously as in the proof of Proposition 1.92 in [19] by expanding ρ(λ) in terms of a rational polynomial approximation in the neighbourhood of the real, first-order stationary phase points, λ0, λ1, λ2.
Lemma 4.1.
Let m(x, t; λ) be the solution of the RH problem formulated in (3.6). Set mΔ(x, t; λ) ≡ m(x,t;λ)(Δ(λ))−1, where
Then m♯(x, t; λ) solves the following (augmented) RH problem on Σ,
Proof.
In terms of the function mΔ(x, t; λ) defined in the Lemma, the original oscillatory RH problem (3.6) can be rewritten in the following form,
Then the new RH problem is equivalent to the RH problem (3.6).
4.2. RH Problem on the Truncated Contour
In this section we show how to convert the RH problem (4.7) on Σ to a RH problem on a truncated contour with controlled error terms.
From the above section we have
The RH problem (4.7) can be solved as follows (see, for example, [3]). Let
Thus, for example, for λ > λ0 we have
Define
By the method of Beals and Coifman,
Substituting formula (4.12) into (4.8), we learn that
Let we : Σ → M(2, ℂ) be a sum of three terms
Set
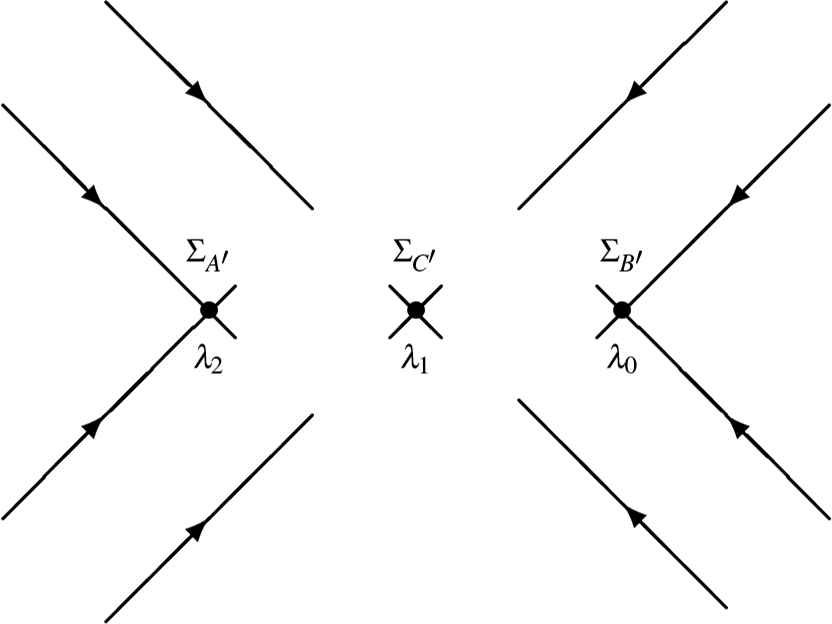
Truncated contour Σ′.
Observe that w′ = 0 on Σ\Σ′.
Lemma 4.2.
For arbitrary l ∈ ⩾1 and sufficiently small ε ∈ ℝ>0, as t → +∞ such that λ′ = min{|λ0|,|λ1|,|λ2|}>M,
Proof.
By the conclusion of Proposition 4.1, the following estimates,
Definition 4.1.
Denote by 𝒩 (·) the space of bounded linear operators acting in
Lemma 4.3.
As t →+∞ such that λ0 > M,
Proof.
Using the consequence of the following inequality,
Proposition 4.2.
If (Id −Cw′)−1 ∈𝒩 (Σ), then for arbitrary l ∈⩾1, as t → + ∞ such that λ0 >M,
Proof.
Using second resolvent identity and analogous calculations as (2.27) and Proposition 2.63 in [19] (or, Proposition 5.1 in [29], Proposition 3.19 in [26])
In the sense of appropriately defined operator norms, let us show that it may always choose to minus (or plus) a part of contour on which the jump matrix is
Let:
-
R ∑′:
-
-
-
-
-
IdΣ′ and IdΣ denote, respectively, the identity operators on
Lemma 4.4.
Proof.
See Lemma 2.56 in [19].
Proposition 4.3.
If
Proof.
The boundedness of
From Proposition 4.3 we obtain that the asymptotic behavior can be constructed by the following RH problem on the contour Σ′,
Denote
4.3. RH Problem on the Disjoint Crosses
In this section, we will show that how to separate out the contributions of the three crosses in Σ′ to the solution q(x,t) in the formula (4.15). The main result in this part is Proposition 4.5.
Let us introduce some notations which for exact formulations. Taking Σ′ as the disjoint union of the three crosses, ΣA′, ΣB′, and ΣC′, extend the contours ΣA′, ΣB′, and ΣC′ (with orientations unchanged) to the follows,
Let us prepare the following operators, for k ∈ {A,B,C},
Set
Denote
Then we have,
In the remainder of this section, we remove the special notation for
Proposition 4.4.
For k ∈ {A,B,C},
The contours Lk are defined following,
Proof.
Analogous to the prove of Lemma 3.5 in [19], Proposition 6.1 in [29] or Lemma 3.20 in [26].
We introduce following expressions
Lemma 4.5.
Let κ ∈(0,1). Then
Lemma 4.6.
([29]). For general operators
Lemma 4.7.
For α ≠ β ∈ {A′,B′,C′}, as t → +∞ such that λ0 >M,
Proof.
Analogous to Lemma 3.5 in [19].
Proposition 4.5.
If, for k ∈ {A,B,C},
Proof.
Analogous of (2.27) in [19] and the second resolvent identity, one writes
From the Lemma 4.2,
According to Lemma 4.2,
According to the Cauchy-Schwarz inequality and Lemma 4.2,
By Lemma 4.7 and the assumption that
Then, substituting identity (4.25) into (4.24), and recalling (4.21) and (4.22), the proof is complete.
Lemma 4.8.
For k ∈ {A,B,C},
Remark 4.1.
The Lemma 4.8 was proved in [19, 29]: In order to obtain the explicit asymptotic formulae presented in Theorem 2.2. we need a model RH problem which arises in crosses.
Proof.
We only consider the case k=B, the cases k=A and C follow in an analogous manner. From Lemma 4.3, by the fact that the boundedness of
Set
On ΣB, we have the diagram in Figure. 4(a)
(a) ΣB; (b) ΣB,r; and (c) Σex ≡ ΣB,r ∪ ℝ.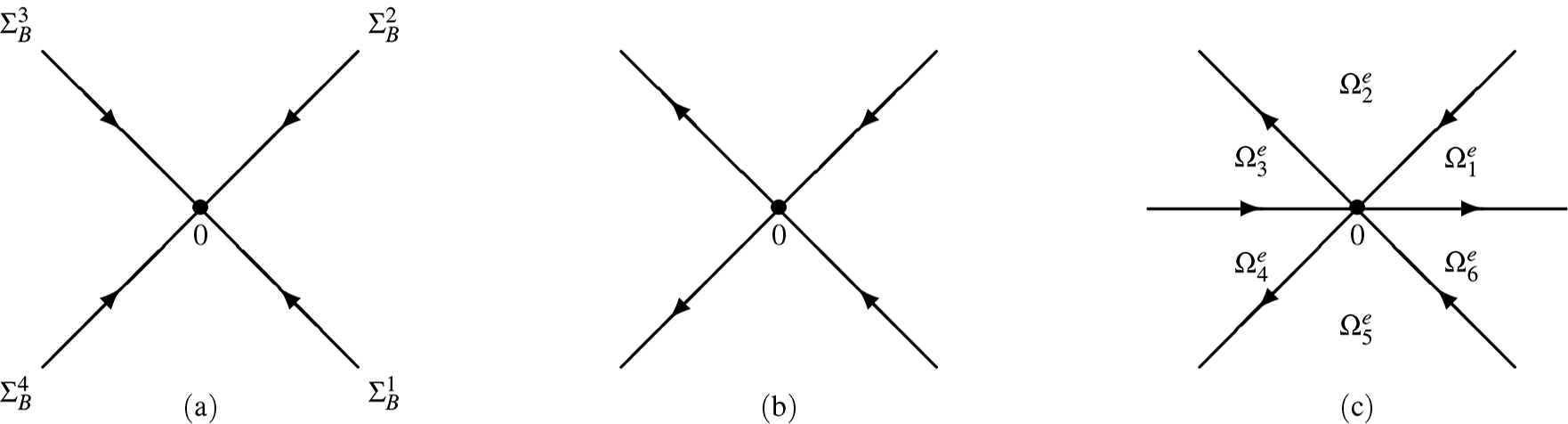
Set
Hence, as t → ∞,
Then reorient ΣB to ΣB,r as Figure. 4(b). A simple computation shows that the jump matrix
The third step is that extending ΣB,r → Σe = ΣB,r ∪ ℝ with the orientation on ΣB,r as Figure. 4(c) and the orientation on ℝ from −∞ to ∞. And the jump
Set Cωe on Σe. Once again, by Lemma 4.4, it is sufficient to bound (1Σe − Cωe)−1 on L2(Σe).
Then define a piecewise-analytic matrix function ϕ as follows:
Thus, we can get the RH problem of
On ℝ we have
4.4. Model RH Problem
In this section, we will convert the evaluation of the integral in the Lemma 4.3 into three solvable RH problems on ℝ.
For j ∈ {A,B,C}, define
Then, Mj(z) solves the RH problem
If we take the asymptotic expansion,
Substituting into (4.20) of Proposition 4.5 and observe that inequalities (4.27) and (4.28) (and their analogues for ΣA and ΣC), we obtain
Analogous of the references [19, 26, 29], when we consider the case B, write
We have,
By taking the derivative of λ and Liouville theorem, it is easy to show that,
Following [19] (P.350-352), we have
Hence,
The proof of the case A and case C follows in a similar manner, we can get
Proof of Theorem 2.2.
Substituting formulas (4.32), (4.31), (4.33), (4.17), (4.18), (4.19) into (4.30), then we can get the equation (2.3), i.e., the theorem 2.2 is proven.
Acknowledgement
The author thank the two referees for valuable comments. Support is acknowledged from the National Science Foundation of China, Grant No. {11901141, 11671095}.
References
Cite this article
TY - JOUR AU - Lin Huang PY - 2020 DA - 2020/09/04 TI - Asymptotics behavior for the integrable nonlinear Schrödinger equation with quartic terms: Cauchy problem JO - Journal of Nonlinear Mathematical Physics SP - 592 EP - 615 VL - 27 IS - 4 SN - 1776-0852 UR - https://doi.org/10.1080/14029251.2020.1819605 DO - 10.1080/14029251.2020.1819605 ID - Huang2020 ER -