
Quaternion-Valued Breather Soliton, Rational, and Periodic KdV Solutions
- DOI
- 10.1080/14029251.2020.1757234How to use a DOI?
- Abstract
Quaternion-valued solutions to the non-commutative KdV equation are produced using determinants. The solutions produced in this way are (breather) soliton solutions, rational solutions, spatially periodic solutions and hybrids of these three basic types. A complete characterization of the parameters that lead to non-singular 1-soliton and periodic solutions is given. Surprisingly, it is shown that such solutions are never singular when the solution is essentially non-commutative. When a 1-soliton solution is combined with another solution through an iterated Darboux transformation, the result behaves asymptotically like a combination of different solutions. This “non-linear superposition principle” is used to find a formula for the phase shift in the general 2-soliton interaction. A concluding section compares these results with other research on non-commutative soliton equations and lists some open questions.
- Copyright
- © 2020 The Authors. Published by Atlantis and Taylor & Francis
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. Introduction
1.1. The KdV Equation
The Korteweg-deVries (KdV) Equation
In the case that u(x,t) takes values in some non-commutative algebra, a natural generalization of the KdV Equation is the symmetrized form:
The purpose of this paper is to carefully study certain quaternion-valued solutions to (1.2). Although solutions to integrable equations such as KdV have been previously explored both in more general non-commutative settings [3, 6, 9, 23] and in the quaternionic case [12], the specific breather soliton, rational and periodic solutions investigated below, their construction in terms of quaternionic determinants, and their nonlinear superpositions have not previously been described.
1.2. Quaternions
The quaternions were first studied by William Rowan Hamilton as a number system which generalized the complex numbers [10]. Although their non-commutativity was a novelty in 1844, since the quaternions can be embedded into a matrix group, they may not seem particularly interesting to a modern mathematical physicist. For many years they were seen as being “old-fashioned”, merely a historical stepping stone on the way to more general non-commutative algebras. However, recently they have received an increasing amount of attention in relation to differential equations and dynamical systems [7,17,20 ,25], for their uses in mathematical physics and engineering [1,11,15,19 ], and even for their unique algebraic structure [4 , 18, 27]. This resurgence of interest in the quaternions shows that some important properties of quaternionic solutions are not immediately evident when they are viewed in the more general context of matrix algebras and justifies the current investigation into the quaternion-valued solutions of the KdV equation.
This section will briefly review some key properties of the quaternions and set up the terminology and notation to be used in the remainder of the paper. For additional information, readers should consult References [5, 8].
1.2.1. Notation and Arithmetic
The quaternions are the 4-dimensional real vector space
It is often convenient to separate a quaternion q into its real part q0 and vector part
Proposition 1.1.
Two quaternions q and r satisfy r = gqg−1 for some quaternion g if and only if q0 = r0 and
Exponential functions involving quaternions will be needed later in this paper. It is therefore useful to note that by writing eq as a power series one can easily show that
1.2.2. Quaternion-Valued Functions
Throughout the remainder of this paper, x and t will be real-valued variables and functions of these variables will take values in . Together, such quaternion-valued functions will be taken to form a right module over the quaternions. (Hence, any reference to linear combinations of such functions will be considered to be a sum of functions with quaternionic coefficients on the right.)
When a quaternion-valued function f (x,t) is to be represented graphically, it will be illustrated by graphing each component function fi(x,t) (0 ⩽ i ⩽ 3) separately on the same set of axes for some fixed value of t.
1.2.3. Determinants of Quaternionic Matrices
Interestingly, although there is no useful generalization of the determinant to arbitrary non-commutative settingsa, there are definitions for a determinant of a square matrix of quaternions that generalizes the usual determinant and have corresponding Cramer-like theorems [4, 18]. By setting up notation and summarizing some prior results, this section lays the foundation for the construction of quaternion-valued KdV solutions using these determinants in Theorem 2.1.
Definition 1.1.
If a permutation σ in the group Sn of permutations on the set {1,...,n} is a cycle, then it can be written in the normalized form σ =(c1c2 ···ck), where c1 > cj for j > 1. Any permutation σ ∈ Sn has a unique factorization into normalized cycles
Definition 1.2.
Let
For a cycle σ =(c1 ···ck) ∈ Sn the symbol Mσ denotes the ordered product
Definition 1.3.
For an n × n matrix M =[mij] whose elements are from some non-commutative ring, define the Chen Determinant cdet(M) to be
Note that if the elements of the matrix mutually commute, then cdet(M)= det(M) is the ordinary determinant of the matrix, but if they do not then this definition specifies a unique ordering of the factors. If the elements mij ∈ are quaternions, then it is possible to solve the vector equation Mv = w or to write the inverse matrix M−1 in terms of these Chen determinants [4, 18]. This construction involves not only the matrix M but also its conjugate transpose
Proposition 1.2.
An n × n matrix M of quaternions is invertible if and only if the real number cdet(M†M) is non-zero. If it is, then the (i, j) entry of the matrix M−1 is
Remark 1.1.
Definition 1.3 and Proposition 1.2 can be found in References [4, 18]. However, they have been rewritten in the notation set up by Definitions 1.1 and 1.2 into a form that is more convenient for their use in this paper.
2. Construction of Quaternion-Valued Solutions
2.1. KdV-Darboux Kernels
Definition 2.1.
Let Φ = {ϕ1(x,t),..., ϕn(x,t)} be a set of functions ϕi : ℝ2 → depending on the real variables x and t and taking values in the set of quaternions. We will call Φ a KdV-Darboux Kernel if it has the following properties:
Dispersion: For each 1 ⩽ i ⩽ n, ϕi satisfies the linear equation
Closure: For each 1 ⩽ i ⩽ n, the second derivative (ϕi)xx is in span(Φ), the right -module generated by Φ:
Independence: The n × n Wronskian matrix
satisfies cdet(W †W) ≢ 0 and hence is an invertible matrix by Proposition 1.2.
2.2. KdV Solution Associated to a KdV-Darboux Kernel
The selection of a KdV-Darboux kernel determines a differential operator having those functions in its kernel which can be written in terms of the elements of the multiplicative inverse of the Wronskian matrix:
Lemma 2.1.
Let Φ = {ϕ1,...,ϕn} be a KdV-Darboux Kernel with Wronskian matrix W. Then the ordinary differential operator
Proof.
The independence property of Definition 2.1 implies the existence of an inverse matrix W−1. Then it follows from Theorem 3.6 in Reference [14] that the operator K defined in (2.3) annihilates each of the functions ϕi. (That paper considers operators which act on functions taking values in an arbitrary unital algebra which can be written as polynomials in an endomorphism satisfying a generalization of the product rule. Here we are considering the special case in which the algebra is the quaternions and the endomorphism is the differential operator
The uniqueness follows from the fact that if K′ was another such operator then the difference K −K′ would be an operator of order strictly less than n having the span of Φ in its kernel. However, Theorem 5.1 in Reference [14] states that any operator whose kernel contains Φ would factor as Q ◦ K for some differential operator Q. The only way that Q ◦ K could have order less than K is if Q = 0 and hence K − K′= 0 ◦ K = 0 implying that K = K′.
The operator K from Lemma 2.1 will be used to produce a quaternion-valued solution to the KdV equation. This is a standard construction and so far nothing has been said that is specific to the case of the quaternions. However, beginning with the following theorem we take advantage of the fact that the functions in the KdV-Darboux kernel are quaternion-valued and write the corresponding solution in terms of Chen Determinants.
Theorem 2.1.
Let Φ = {ϕ1,...,ϕn} be a KdV-Darboux Kernel with Wronskian matrix W. Then the quaternion-valued function
Proof.
Using Proposition 1.2, equation (2.3) can be rewritten in terms of Chen determinants as
The closure property of the KdV-Darboux kernel implies that each element of Φ is in the kernel of the operator K ◦ ∂ 2. Then, Theorem 5.1 in Reference [14] implies the existence of a differential operator L satisfying the intertwining relationship
Setting up notation for the coefficients of the operators K and L, let us write
Equating coefficients on each side of (2.7) one finds that v(x,t)= 0 and uΦ(x,t)=(−2cn−1)x. (N.B. That the potential in the Schrödinger operator L is −2 times the x-derivative of the coefficient of ∂ n−1 in K is a useful observation which will be referred to in several of the other proofs in this paper.) The formula for uΦ(x,t) in the claim can then be recovered by isolating the coefficient c n −1from (2.6).
In the case where Φ contains only one element, it is clear that K = ∂ − ϕxϕ−1 since this is a monic differential operator of order 1 having ϕ in its kernel. But, by the argument above, this means that uΦ =(2ϕxϕ−1)x, which expands to the claimed formula.
All that remains is to demonstrate that uΦ satisfies the KdV equation, a fact that follows from the dispersion property of the KdV-Darboux kernel using a standard technique in soliton theory which is only briefly outlined below.
Differentiating K(ϕi)= 0 with respect to t, using the dispersion relation to rewrite t derivatives as x derivatives and again applying Theorem 5.1 from Reference [14], one concludes that K˙ + K ◦ ∂ 3 = M ◦ K for some differential operator M. Equating coefficients again one determines that
Remark 2.1.
This method of producing solutions to (1.2) and the arguments in the proof are not very different from those used in the seminal paper by Etingof, Gelfand and Retakh [6] where non-commutative solutions were produced using quasi-determinants. However, the formula in Theorem 2.1 works for all KdV-Darboux kernels, even those for which the Wronskian matrix contains many zero entries which impose obstacles to computing the quasi-determinant. In addition, we wanted to take advantage of the extra algebraic structure of the quaternions that allows for solution of linear systems using the Chen determinant.
Example 2.1.
Let Φ be the KdV-Darboux kernel
The solution uΦ(x,t) of (1.2) is the x-derivative of the expression above.
2.3. Lemmas Relating Different KdV-Darboux Kernels
The map associating a KdV-Darboux kernel Φ to the corresponding solution uΦ actually depends only on span(Φ):
Lemma 2.2.
If Φ and
In particular, if Φ = {ϕ1,...,ϕn} and
Proof.
Suppose Φ and
However, spanning the same right module is not the only way two KdV-Darboux kernels can correspond to the same solution. The following lemma shows that they do not even have to have the same number of elements:
Lemma 2.3.
If Φ = {ϕ1,...,ϕn} is a KdV-Darboux kernel and ϕn= αeλx+ λ3t for some α,λ ∈ then
Proof.
Let
Let Q = ∂ − αλ α−1 be the monic differential operator of order 1 with ϕn in its kernel. Define
For i < n it is zero since
Expanding the product
For example, for any quaternions α and λ (with α ≠ 0) the two-element KdV-Darboux kernel Φ = {x,αeλx+λ3t} and the single-element KdV-Darboux kernel
Finally, we note that multiplying every element of the KdV-Darboux kernel on the left by the same non-zero quaternion has the effect of rotating the corresponding solution:
Lemma 2.4.
Let Φ = {ϕ1,...,ϕn} be a KdV-Darboux kernel, q ∈ a non-zero quaternion, and
Proof.
Let K be the monic differential operator of order n having the elements of Φ in its kernel. Note that
3. Basic Solution Types
There are three kinds of non-trivial quaternion-valued solutions to (1.2) that can be produced using a KdV-Darboux kernel with one element: localized breather solitons, translating periodic solutions, and rational solutions.
3.1. 1-Soliton and Translating Periodic Solutions
Section 3.1 will consider the solutions associated to KdV-Darboux kernels of the form {ϕα,β,λ } where
In fact, it is not necessary to consider all possible combinations of quaternions α, β and λ. First, we will assume that αβλ ≠ 0. This both guarantees that {ϕα,β,λ } is a KdV-Darboux kernel (which fails to be the case when α = β = 0) and eliminates the cases in which uα,β,λ (x,t) ≡ 0 is the trivial solution.
Furthermore, one can greatly restrict the selection of the parameter λ without losing any corresponding KdV solutions.
Lemma 3.1.
Let α, β and λ be quaternions such that αβ λ ≠ 0. Then there are quaternions
Proof.
Since ϕα,β,λ = ϕβ,α,−λ we may assume, without loss of generality, that λ0 ⩾ 0.
Let
By Proposition 1.1, because λ and
Define
It then follows from Lemma 2.2 that they generate the same solutions.
Consequently, no non-trivial solutions will be lost by the fact that we will henceforth limit our attention only to the case in which αβ λ ≠ 0 and λ = λ0 + λ1i is a complex number with λ0,λ1 ⩾ 0.
The real numbers
As one might guess from (3.2), vc and vp will play the role of two separate velocities. Considering the graph of uα,β,λ as a function of x with t playing the role of a time parameter, the periodic features coming from the trigonometric functions will translate to the left with velocity vp while the localized soliton has a center which translates with velocity vc.
The next two sections separately handle the cases λ0 = 0 and λ0 ≠ 0 which are qualitatively very different.
3.1.1. Translating Periodic Solutions
Consider the case in which λ0 = 0 (so that λ = λ1i is a purely imaginary complex number). Then the corresponding solution to the KdV equation is a spatially periodic solution that translates at a constant speed in time.
Theorem 3.1.
If λ = λ1i then the associated KdV solution has a graph that is invariant under a horizontal translation in x by 2π/λ1 units and viewing t as a time parameter this periodic waveform translates to the right at constant speed
Proof.
Using Equation 3.2 and the fact that
Substituting this into (2.5) and using trigonometric identities, one can determine that the corresponding KdV solution has the form
Since uα,β,λ can be written as a function in
Example 3.1.
If α = 1 + k, β = 1 and λ = i then
The four components of this solution at time t = 0 are shown in Figure 1. As expected, an animation shows the solution translating to the right at constant speed 1 and a horizontal spatial translation by π units leaves the graph of w(ξ) invariant.
The periodic translating solution uα,β,λ (x,t) with α = 1 + k, β = 1 and λ = i at time t = 0.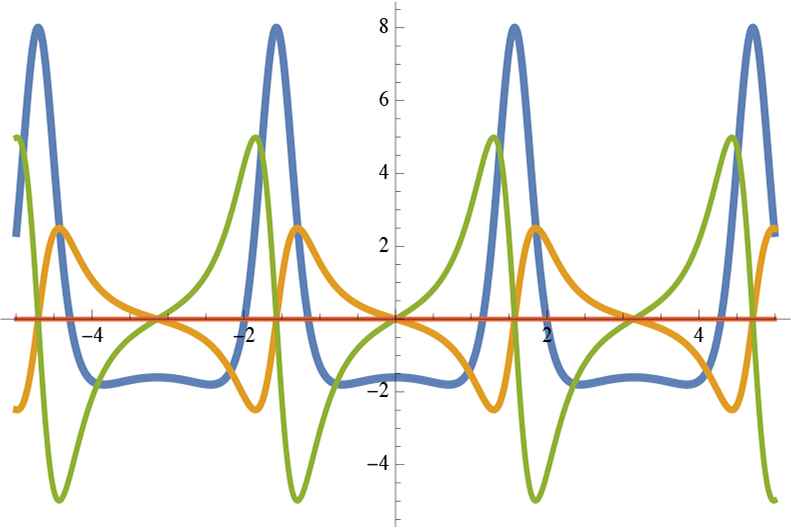
3.1.2. Localized Breather Solitons
Theorem 3.2.
If λ0 ≠ 0 then for any fixed t the graph of the solution uα,β,λ as a function of x will be localized in a small neighborhood of
Proof.
The squared amplitude of the solution uα,β,λ can be written in the form
If λ0 > 0 then for sufficiently large values of |x| this amplitude converges quickly to 0. In this sense, we can already see that the solution is localized when λ has a non-zero real part. Moreover, if we “average out” the small variation from the trigonometric functions by setting them both equal to zero, then this amplitude function has a unique local maximum located at x = cα,β,λ (t).
So, in the case λ0 > 0 an animation of the solution uα,β,λ (x,t) as a function of x with t playing the role of time will show a localized disturbance centered at x = cα,β,λ (t) and traveling to the left with velocity vc. However, if λ1 > 0 as well, then the formula for the solution will also involve at least one of the functions cos(θ) or sin(θ). Since θ is a function of x + vpt, these features will be moving to the left at velocity vp. If it were the case that vc = vp, then the waveform would simply translate in time. However, there are no real solutions to
Example 3.2.
Consider the case α = j, β = 1 + k and
3.1.3. Singularities
Either the periodic or breather soliton solutions can exhibit singularities. The following result completely identifies the values of the parameters α, β and λ that produce entirely non-singular solutions. A surprising corollary is that any of these solutions exhibiting singularities must be inherently commutative in that it is conjugate to a complex-valued solution of the standard KdV equation.
Theorem 3.3.
The quaternion-valued KdV solution uα,β,λ (x,t) is non-singular for all x and t if any of these three conditions involving the number q = α−1β is satisfied:
- I.
- II.
λ0 = 0 and |q| ≠ 1 or
- III.
λ1 = 0 and q is not a negative real number.
Moreover, the solution uα,β,λ (x,t) is undefined for some (x,t) ∈ ℝ2 if none of the conditions is satisfied.
Proof.
Throughout Section 3.1 it has been assumed that αβ λ ≠ 0. Hence, we know that α is invertible. Define q = α−1β and note that by Lemma 2.4 we know that u1,q,λ = α−1uα,β,λ α. One of these solutions is singular if and only if the other is. Consequently, it is sufficient to determine when the solution u1,q,λ is singular.
Since ϕ1,q,λ is infinitely differentiable for all x and t regardless of the values of the parameters, the only way that u1,q,λ given by (2.5) could fail to be defined and differentiable at (x0,t0) is if |ϕ1,q,λ |(x0,t0) is zero. Using the previous notation that
This sum of the squares of four real numbers can only be zero if all four of them are equal to zero.
If condition I is met then the last two terms in (3.4) are non-zero and the solution must be non-singular.
Now suppose condition II is met. Since λ0 = 0 the exponential terms are equal to 1 and (3.4) reduces to
And, if condition III is met then θ = 0 and (3.4) becomes
If q is not a real number then
This shows that the solution is entirely non-singular if any one of the three conditions is met. Now, assume that none of the conditions is satisfied. So, we know that
Assuming (i) and (iii) ensures that the function in the exponent and the trigonometric argument θ are linearly independent linear functions of the variables x and t and hence can be simultaneously solved to take any desired value. The point (−q0,−q1) is on a circle of radius |q| around the origin and hence can be written as (|q|cos(θ0),|q|sin(θ0)) for some value of θ. Then one can simultaneously find values of x and t such that e2λ0(x+vct) = |q| and θ = θ0 thereby making the entire expression equal to zero.
If (i) and (iv) are assumed to be true then q is a negative real number and we want to show that
Now suppose that (ii) and (iii) are true. We can further assume that λ0 = 0 because otherwise (i) is true and we already handled that case. But then the expression reduces to (q0 + cos(θ))2 +(q1 + sin(θ))2. By assumption (ii), we know that the point (−q0,−q1) lies on the unit circle and hence there is a number θ0 such that it is equal to (cos(θ0),sin(θ0)). Since λ1 ≠ 0 it is possible to choose x and t so that θ = θ0 and the expression then becomes zero.
Finally, consider the case in which (ii) and (iv) are both true. If λ0 ≠ 0 is also true then that would mean (i) and (iv) are true, and it has already been demonstrated that the solution is singular in that case. On the other hand, if λ0 = 0 then λ1 ≠ 0 (because λ ≠ 0 is assumed throughout this section), but then (ii) and (iii) are true which has also already been handled.
Remark 3.1.
One might guess from Figure 2 that the breather soliton solution in Example 3.2 is singular because it appears to have a pole in the bottom figure. However, α−1β = −i − j is not a complex number and hence according to Theorem 3.3 it is not. (In fact, redrawing the graph at time t = 1 over a larger vertical range confirms that there is simply a local maximum that is outside of the viewing window in Figure 2.)
The 1-soliton solution uα,β,λ with α = j, β = 1 + k and 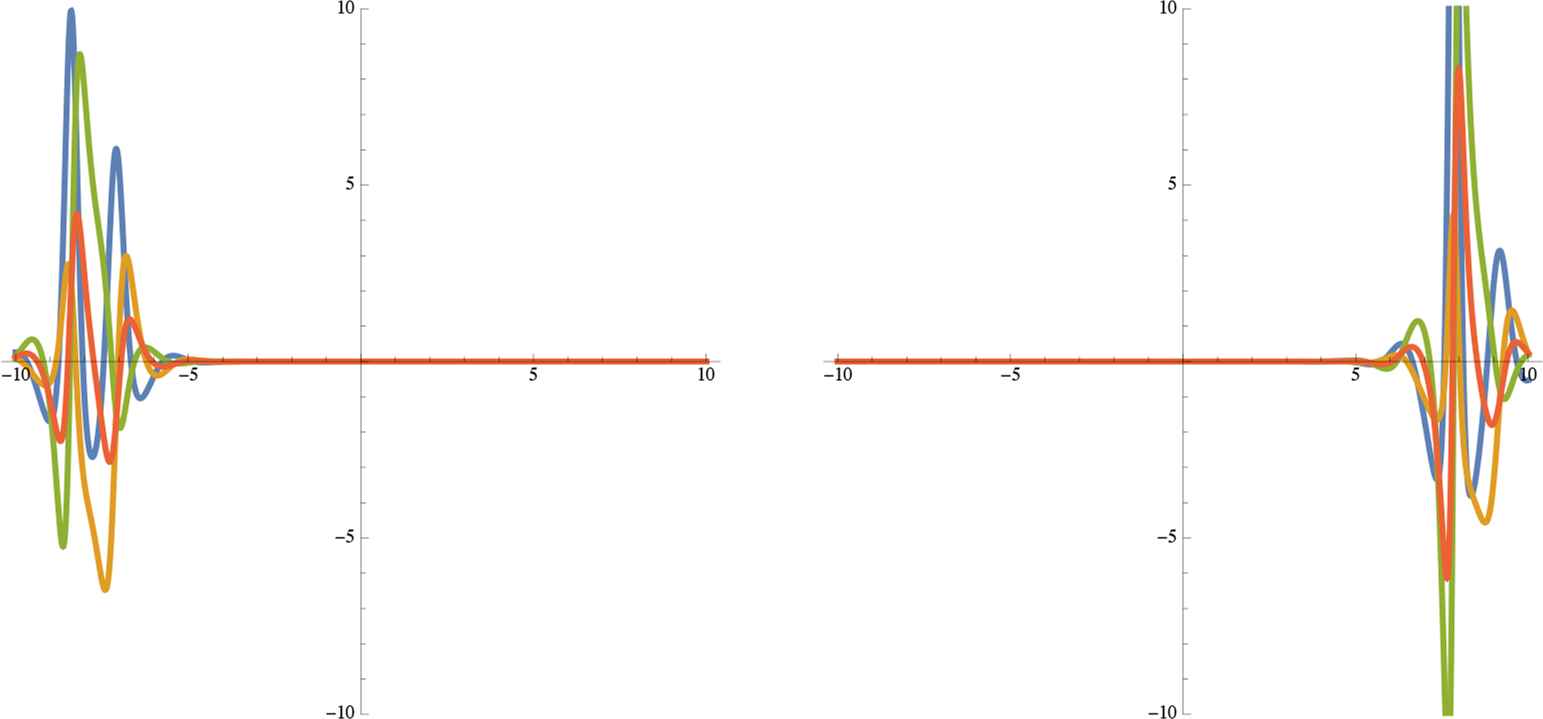
Example 3.3.
The periodic solution shown in Example 2.1 is non-singular because α = 1+k, β = 1 and λ = i so q = α−1β = 1/2−1/2k which satisfies criterion II. On the other hand, choosing α = 1,
Surprisingly, it turns out that uα,β,λ has singularities only when the solution is really commutative:
Corollary 3.1.
If the solution uα,β,λ (x,t) is singular then u(x,t)= α−1uα,β,λ α is a complex-valued function, and uα,β,λ is a solution of the usual KdV equation (1.1).
Proof.
If uα,β,λ (x,t) is singular then q = α−1β ∈ ℂ must be a complex number (else Condition I of Theorem 3.3 is met and the solution would be non-singular). Note that ϕ1,q,λ = α−1ϕα,β,λ. By Lemma 2.4
3.2. Rational Solutions
Definition 3.1.
Let ψ0(x,t,z)= exz+tz3 and for m = 0,1,2,... define Δm(x,t) to be
Note that Δm(x,t) ∈ [x,t] is a polynomial in x and t with integer coefficients and that it has degree m as a polynomial in x.
Theorem 3.4.
For any n ∈ ℕ and αj ∈ , Φ = {ϕ0,...,ϕn} is a KdV-Darboux kernel where
Proof.
Because
For i < n, (ϕi)xx = ϕi+1 ∈ Φ. On the other hand, ϕn is the (2n)th derivative of a polynomial of degree 2n + 1, and so it is a linear function of x. Then (ϕn)xx = 0 ∈ span(Φ). Thus Φ satisfies the closure property for KdV-Darboux Kernels.
Finally, to demonstrate the invertibility of the Wronskian matrix W, we consider a linear combination
Since Φ is a KdV-Darboux kernel we know that uΦ is a KdV solution and (2.4) shows that it can be found through products, and sums of derivatives of these polynomials followed by division by a real-valued polynomial and hence each component function is a rational function of x and t.
Example 3.4.
The first example of a quaternion-valued KdV solution above in Example 2.1 was an instance of this construction in the case n = 1, α0 = k and α1 = i.
Remark 3.2.
In fact, one may choose any finite linear combination of the polynomials Δm(x,t) and create a KdV-Darboux kernel out of this polynomial and all of its non-zero, even order derivatives in x. However, due to Lemmas 2.2 and 2.3, no new KdV solutions would be gained by considering even degree polynomials in Φ or including lower order odd degree terms in the formula for ϕi. (See [24] for details.)
4. Unions of KdV-Darboux Kernels
Since the dispersion and closure properties of Definition 2.1 are preserved under the taking of unions, it follows immediately that:
Theorem 4.1.
If Φ1 and Φ2 are KdV-Darboux kernels then Φ = Φ1 ∪ Φ2 is also a KdV-Darboux kernel as long as its Wronskian matrix is invertible.
This way of combining KdV-Darboux kernels allows for the creation of n-soliton solutions or hybrids that exhibit features of more than one of the basic solution types described in the previous section. For example, there is a rational-periodic hybrid solution coming from the union of the KdV-Darboux kernels in Examples 2.1 and 3.1.
The main focus of this section will be the case in which one additional function of the form ϕα,β,λ with λ0 > 0 is added to a KdV-Darboux kernel. It is a consequence of Lemma 2.3 that the resulting solution will look like two different solutions “glued” together, one visible to the left of the localized disturbance that has been added and other other to the right of it. This general fact will be both proved and illustrated in Section 4.1. Then in Section 4.2 it will be used to derive a formula for the phase shift of an arbitrary 2-soliton solution.
4.1. Asymptotics to the Left and Right of a Localized Disturbance
Proposition 4.1.
Let Φ = {ϕ1,...,ϕn} be a KdV-Darboux kernel where n ⩾ 2 and ϕn has the form
Proof.
The “center” cα,β,λ (t) is the value of x for which there is a balance between the magnitude of the two exponential terms in ϕn. For x much smaller than it, αeλx+λ3t is negligibly small. For those values of x, the solution uΦ(x,t) will not look noticeably different than it would if ϕn was equal to β e−λx−λ3t, which according to Lemma 2.3 is precisely uΦL. Similarly, when x is much larger than cα,β,λ (t) the term β e−λx−λ3t is negligibly small and the solution would not look noticeably different than it would if that term was not there, which is uΦR according to Lemma 2.3.
Example 4.1.
Consider the “hybrid” rational/soliton solution uΦ that comes from the choice
According to Proposition 4.1 the left side of this solution should look like
Each of these is a stationary (t-independent) quaternion-valued KdV solution. They are shown in the left-most and right-most images of Figure 3 respectively. The middle two images of that figure show uΦ at times t = −5 and t = 5. Then we can see that uΦ looks like uΦL to the left of the incoming soliton and looks like uΦR to the right of it.
The figure on the left shows the stationary solution uΦL and the figure on the right shows the stationary solution uΦR from Example 4.1. The other two figures show the hybrid rational/soliton solution uΦ at times t = −5 and t = 5 and one can see that it looks like uΦL to the left of the localized disturbance and looks like uΦR to the right of it. Since a graph of uΦ for very negative and positive times in the viewing window shown above would look indistinguishable from the figures at the far left and right above, one could look at them successively as representing an animation of the evolution in time of the solution uΦ: it begins looking like uΦL, then a localized disturbance comes in from the right and after it passes the solution now looks instead like uΦR.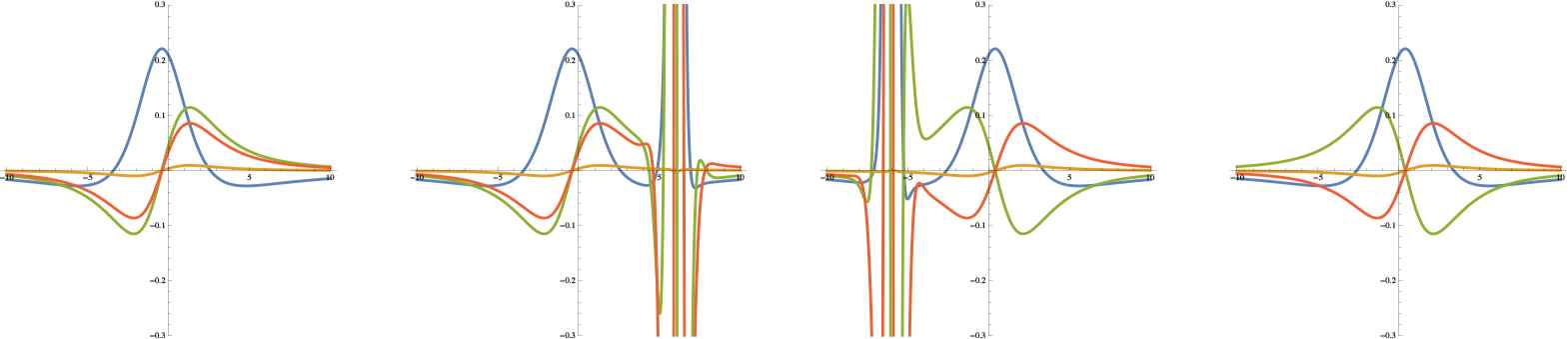
Remark 4.1.
Since Proposition 4.1 will mostly be applied in the case that each ϕi ∈ Φ is a function of the form (3.1), it is worth noting that the differential operator Q defined by Q(f) = fx − γf preserves that form. In particular, it can easily be computed that for any
Example 4.2.
Let Φ1 be the KdV-Darboux kernel
The interesting thing about this is that since |βL| = 1 ≠ |βR| the solution it looks like on the left is singular while the one on the right is not. Figure 4 shows that the solutions appear as predicted. Moreover, this solution is very interesting to watch as an animation because the localized disturbance traveling to the right seems to transform a non-singular periodic solution into a singular one as it passes.
The quaternion-valued KdV solution shown in the middle is uΦ from Example 4.2. According to Proposition 4.1 it should look like the solution uαL,βL,λ1 shown in the figure on the left for sufficiently negative values of x and it should look like uαR,βR,λ1, whose graph appears at the right for sufficiently positive values of x. In fact, this convergence occurs quickly enough that one cannot visually tell the difference for |x| > 3. (All three solutions are shown at time t = 0.)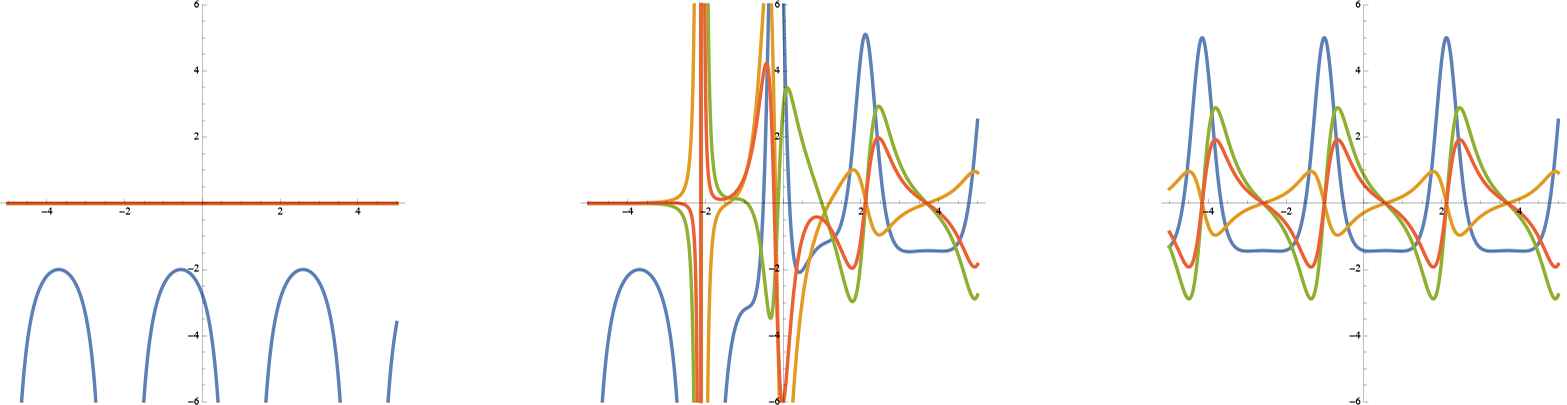
4.2. Phase Shift of the General 2-soliton
Suppose α, β,
Then uα,β,λ and
This section will use Proposition 4.1 to analyze the quaternion-valued KdV solution uΦ where
As will be seen below, there are constants α−,β−,
There are also numbers α+,β+,
The following result provides formulas for the parameters for the corresponding 1-soliton solutions and the phase shifts of each of the localized disturbances. As the examples after it demonstrate, unlike the real case, the phase shift of the solitary wave with greater velocity in the quaternion-valued KdV 2-soliton can be positive, negative, or zero. Additionally, the solitary waves traveling at the same velocities at positive and negative may differ in shape as well as being horizontally shifted relative to each other.
Proposition 4.2.
Choose constant α, β, λ,
-
For sufficiently negative values of t, the solution uΦ will look like the 1-soliton uα−,β−,λ near its center x = cα−,β−,λ (t) and will also look like the 1-soliton
-
For sufficiently positive values of t, the solution uΦ will look like the 1-soliton uα+,β+,λ near its center x = cα+,β+,λ (t) and will also look like the 1-soliton
-
The phase shifts experienced by the interacting solitary waves are
Proof.
First, we will apply Proposition 4.1 to Φ using
On the other hand, when t is very positive then cα+,β+,λ (t) will be far to the right of
The other parameters come from repeating this same process but now using ϕα,β,λ in the role of ϕn when applying Proposition 4.1.
Now, cα+,β+,λ (t) and cα−,β−,λ (t) are two linear trajectories with the same velocity. The difference between them is the phase shift, how much further to the right the disturbance is after the collision than it would have been if it had continued to look like uα−,β−,λ. Using the formula for the center, properties of logarithms and properties of the length operator on quaternions, we can see that
A similar calculation for
Example 4.3.
Imagine a naive observer watching an animation of the 2-soliton solution uΦ where
Watching for some negative values of t, the observer would see a stationary breather soliton sitting just a bit to the right of x = 0 and then another breather soliton approaching from the right at speed 1. In fact, as predicted by Proposition 4.2 the moving soliton looks like uα−,β−,λ as shown at the top-left of Figure 5. In particular, for these negative times, the moving localized disturbance in uΦ is located at
The middle row of pictures shows the 2-soliton uΦ(x,t) from Example 4.3 at times t = −5, t = −4, t = 3 and t = 4. The first row shows the 1-soliton uα−,β−,λ (x,t) and the third row shows the 1-soliton uα+,β+,λ at the same times. Notice that at negative times the moving solitary wave in the middle row is visually indistinguishable from the one above it. However, at later times, it looks instead like the one below it. Each of the 1-soliton solutions is moving to the left with the same velocity and so the same horizontal shift relates their centers at any time. This is the “phase shift”, which is traditionally thought of as being an effect that the interaction of uα−,β−,λ had upon collision with the stationary soliton. (Notice also that the stationary soliton has experienced a phase shift in the opposite direction. It is further to the right after the collision than it was before.)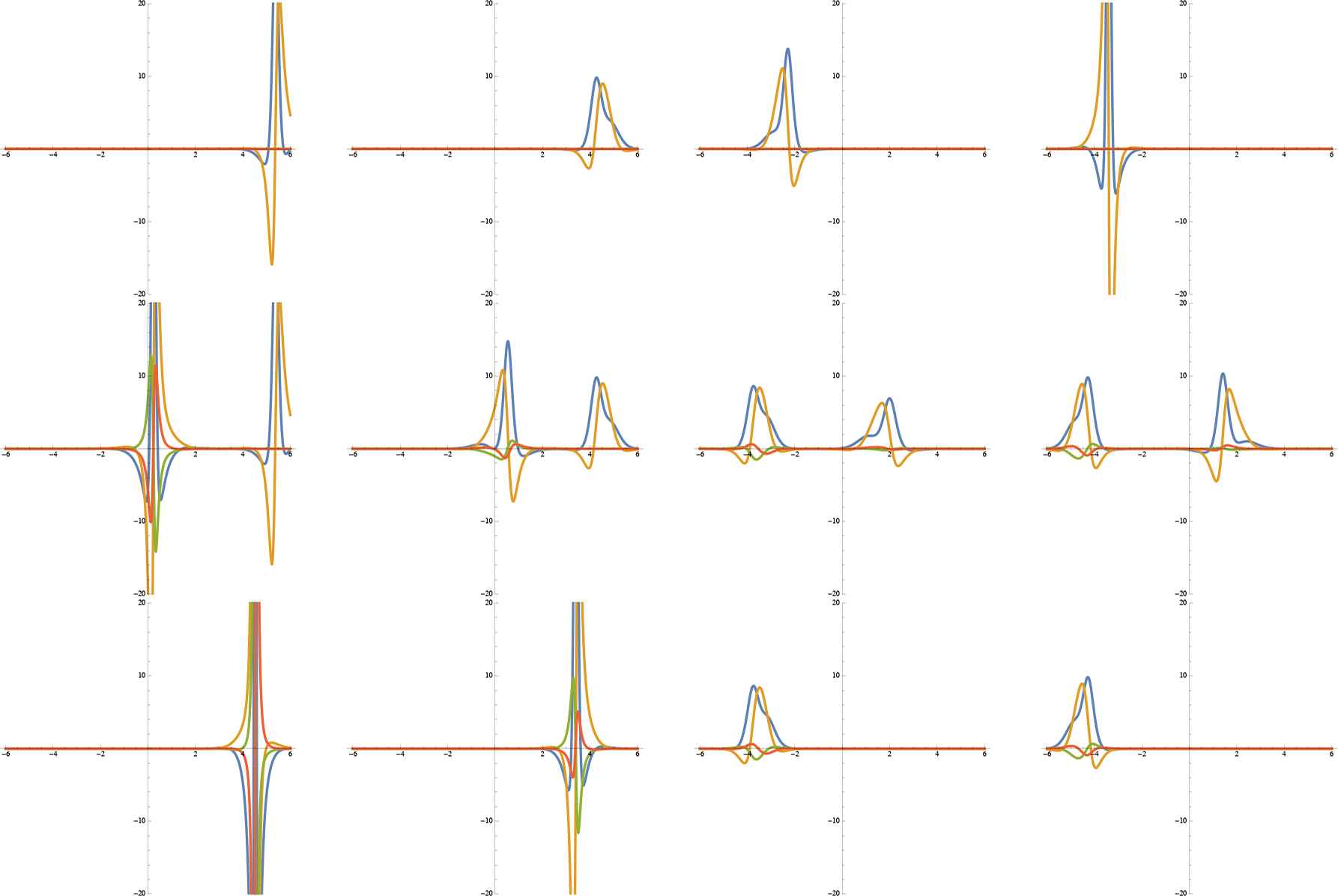
So, the naive observer might assume that this will continue to be true in the future. However, as the images on the right in Figure 5 show, it does not. Although there is still a disturbance moving left at speed 1 at times t = 3 and t = 4, it no longer looks like uα−,β−,λ. Instead, it looks like uα+,β+,λ, a 1-soliton whose center is:
Since they are both traveling to the left at the same speed, their difference is a constant
Remark 4.2.
The phase shift experienced by each of the two solitary waves experience have opposite signs. Like the classical commutative KdV solitons, if one is shifted forwards then the other shifts backwards. However, unlike the original KdV solitons studied by Zabusky and Kruskal [26], the phase shift is not completely determined by the velocities, as the next example illustrates.
Example 4.4.
A one parameter family of interesting examples is the case in which
For any value of c ∈ ℝ this represents a 2-soliton solution with one traveling to the right at speed 26 and another at speed 47. However, the phase shift that they experience depends on c:ln(γ) is positive for
5. Concluding Remarks
Although it is surely no more than a coincidence that the quaternions and the existence of solitary waves were both famously discovered beside British canals in the 19th century, this paper has found interesting results by studying quaternion-valued solutions to the KdV-equation that can be produced using the Chen determinant. This is both a generalization of and a special case of other published research, as will be explained further below.
When the functions in the KdV-Darboux kernel Φ are all either complex-valued or real-valued, then the solution uΦ satisfies (1.1) and many of the new results in this paper reduce to well-known results. For instance, singularities of soliton and periodic complex-valued solutions to KdV have been studied in Reference [21] much as we considered the singularities of the quaternion-valued solutions in Theorem 3.3. However, the generalization to the non-commutative case handled here is non-trivial. Without Corollary 3.1 it was not at all obvious that the singularities that can be found in complex-valued KdV solutions would necessarily fail to exist in their non-commutative quaternionic counterparts. Moreover, as noted in Example 4.4, the phase shift in the quaternion-valued 2-soliton depends on the coefficients as well as on the exponents, something that is not true in the commutative case.
On the other hand, there are also many published papers which address non-commutative solutions to integrable PDEs in more general settings. The KdV equation is merely one equation in the KdV hierarchy, which is a reduction of the KP hierarchy. Quaternions can be viewed as being a special four-dimensional subspace of larger matrix groups, which are then special cases of abstract non-commutative rings. With all of that in mind, the methods utilized herein can be seen as simply being a special case of the more general approaches found in papers such as References [3 ,6,9,23]. However, limiting ourselves to this manageable situation allows us to study details that would be difficult to notice and demonstrate in those more general settings. For instance, we were able to show that it was sufficient to consider exponential functions of the form eλx+λ3t where λ = λ0 + λ1i is a complex number with non-negative components λi (cf. Lemma 3.1). Doing so was essential in being able to state Theorem 3.3 (the result about singularities) in an easily understandable way. And, since is a four-dimensional vector space, we were able to graph the corresponding solutions as a super-position of graphs of four real-valued functions. Moreover, it is interesting to know that quaternion-valued solutions to KdV can be written in terms of the Chen determinant, a result that presumably would not generalize to solutions with values in arbitrary non-commutative rings.
There is one relatively recent paper by Huang [12] which, like this one, specifically addresses quaternion-valued soliton solutions to KdV. However, Huang’s paper only considers a small subset of the solution types that were addressed above. In particular, it only looks at solutions that would come from KdV-Darboux kernels made up of functions of the form ϕα,β,λ where α,β ∈ and λ ∈ ℝ. Thus, it does not include breather, rational, or periodic solutions. Finally, although Reference [12] does discuss “interactions” of the solutions, that term has a very different meaning in that paper. Here, Proposition 4.1 is viewed as a means to understand the interaction of different solutions, with special emphasis on the 2-soliton solutions as representing the interaction between two separate 1-solitons (cf. Proposition 4.2). But in Reference [12], “interaction” refers to an algebraic structure that Huang studies whereby two n-solitons can be combined to produce another n-soliton (for the same fixed value of n).
There are many interesting examples which can be made using the methods described above that we did not have the time or space to present here. For instance, there are 2-soliton solutions that look like a combination of non-singular 1-solitons at negative times and then like a pair of singular 1-solitons for positive times (as if the collision produced the singularities).
There are also open problems that we have not been able to fully address. Theorem 3.3 completely determines when a solution of the form uα,β,λ is singular. However, it is not entirely clear when combinations of such solutions are singular. Although Propositions 4.1 and 4.2 may tell us when they look singular, as Remark 3.1 shows, that is not quite the same as actually being singular. We do not yet have any prediction for what uΦ will look like if Φ = {ϕα1,β1,λ1,...,ϕαn,βn,λn} with n > 1 and λi = λi1i purely imaginary. Most intriguingly, since the solutions above were written in terms of the Chen determinant of a Wronskian matrix, it would be interesting to know whether there is a quaternionic analogue of the τ-function and Hirota’s bilinear approach to soliton equations.
Acknowledgments
This paper grew out of a student research project at the College of Charleston conducted in Summer 2018. The first author’s research was supported by a grant from the School of Sciences and Mathematics, the third author’s research was supported by the University of Charleston, South Carolina (the Graduate School at the College of Charleston), and the fourth author’s research was supported by a Summer Undergraduate Research with Faculty (SURF) grant from the Office of Undergraduate Research and Creative Activities. Assistance from all of these offices and from the Department of Mathematics at the College of Charleston is greatly appreciated.
Footnotes
The quasi-determinant [6] is useful in non-commutative settings. However, it is not a generalization of the determinant in that a quasi-determinant of a matrix which happens to have commuting entries is not equal to the determinant of that matrix.
We are being intentionally vague about what it means for one solution to “look like another” to the right or left of some value of x here because the notation and proofs both become unwieldy otherwise. A rigorous mathematical definition might include an arbitrarily small maximum amplitude for the difference of the two functions when x is is more than a certain distance to the right or left of cα,β,λ (t). It is hoped that Examples 4.1 and 4.2 illustrate both the meaning and significance of Proposition 4.1.
References
Cite this article
TY - JOUR AU - John Cobb AU - Alex Kasman AU - Albert Serna AU - Monique Sparkman PY - 2020 DA - 2020/05/04 TI - Quaternion-Valued Breather Soliton, Rational, and Periodic KdV Solutions JO - Journal of Nonlinear Mathematical Physics SP - 429 EP - 452 VL - 27 IS - 3 SN - 1776-0852 UR - https://doi.org/10.1080/14029251.2020.1757234 DO - 10.1080/14029251.2020.1757234 ID - Cobb2020 ER -