
Field Robot and Sensing System
- DOI
- 10.2991/jrnal.k.190828.005How to use a DOI?
- Keywords
- Field sensing forestry; agriculture; industry
- Abstract
Labors in which forestry and agriculture and factory, are working in severe circumstance. So, such workers are necessarily declines and decreases. However, it is important for us to keep going in economy, life and nature. Therefore, to prevent a devastation of the forest, the safety and the lack of food and work in harsh environments, we are thinking alternative technologies that a part of severe and dangerous works are taken robot instead of such workers. Some changes are needed that they are seen innovation such as the generation of a new industry by new technologies using AI and intelligent to improve how to recognize and express more and more of the things that we have various desires.
- Copyright
- © 2019 The Authors. Published by Atlantis Press SARL.
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. INTRODUCTION
Japan’s population is decreasing after a peak in 2008 due to aging of the population and declining birthrates. Such shrinking population will be having a major impact to build a sustainable economy and society over a long-term period, but almost all people feel that the effects for a short term are small and negligible. Japan’s economy and society will require more development in technologies such as artificial intelligence and robots to make up for a decline in the labor force. However, the decline of the labor force already invites the labor shortages in the industries. Therefore, the Japanese government aims to introduce a new residence status that the foreign workers are accepted in the 14 business sectors which are restaurants, hotels, nursing care, building cleaning, agriculture, fishery, food and beverage, materials processing, industrial machinery, electronics and electric machinery, construction, shipbuilding, vehicle maintenance, and airport ground handling and aircraft maintenance.
The technology of robotics has provided efficient productivity, quality and safety in factory as well as improved operability so far. The developing robots in forestry, agriculture and food factory are active nowadays since AI and robotics technologies has progressed rapidly. Robot in the future has to have the work capacity or the co-operation cooperativeness equivalent to the skilled worker. It is too difficult to make up for the labor shortages only in such robotics technologies at the present.
This paper reports on field robot and sensing system [1–4] as applications of the robotics and AI to the agriculture, the forestry, the food factory and future industrial factory.
2. AGRICULTURE
A decline of Japan’s agriculture has two big problems related to work in the severe environmental conditions such as hot summer climate and labor shortage. Foreign agriculture uses a large-scale management represented by United States, Australia and The Netherlands using the agricultural machines or the environmental control technology introduced the latest technologies.
2.1. Present State of Japan
About 4.42 million ha of the Japanese are of the cultivated land in 2018 is estimated to be 54.4% of paddy fields, 45.6% exclusive use for meadows and 6.3% land under permanent crops of the total amount of the fields.
Survey results are described in the meeting’s materials of Cabinet Secretariat of Government of Japan as is shown in Figure 1.
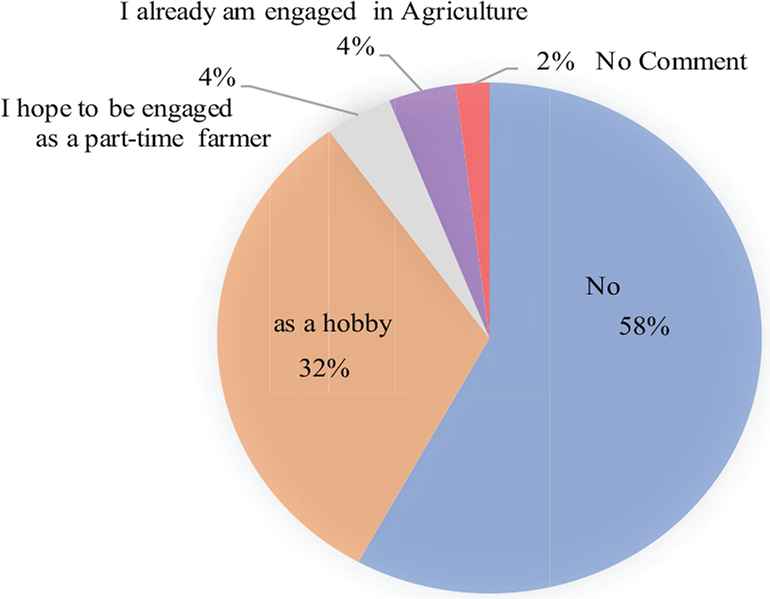
Question: Do you hope to be engaged in the agriculture?
The farmers who mainly engaged in farming is estimated to be 1.50 million persons, average age: 66.7 in 2017, compared with 2.05 million persons, average age: 66.7 in 2010. Taking Japan’s rapidly decreasing working population to consideration, it will be too severe in reality for the future agriculture to substantially decrease the farmers. The age structure of farmer in each country shown in Figure 2 reveals that the Japanese farmers of this kind are more likely to be “mainly and significantly aged farmers” than other countries.
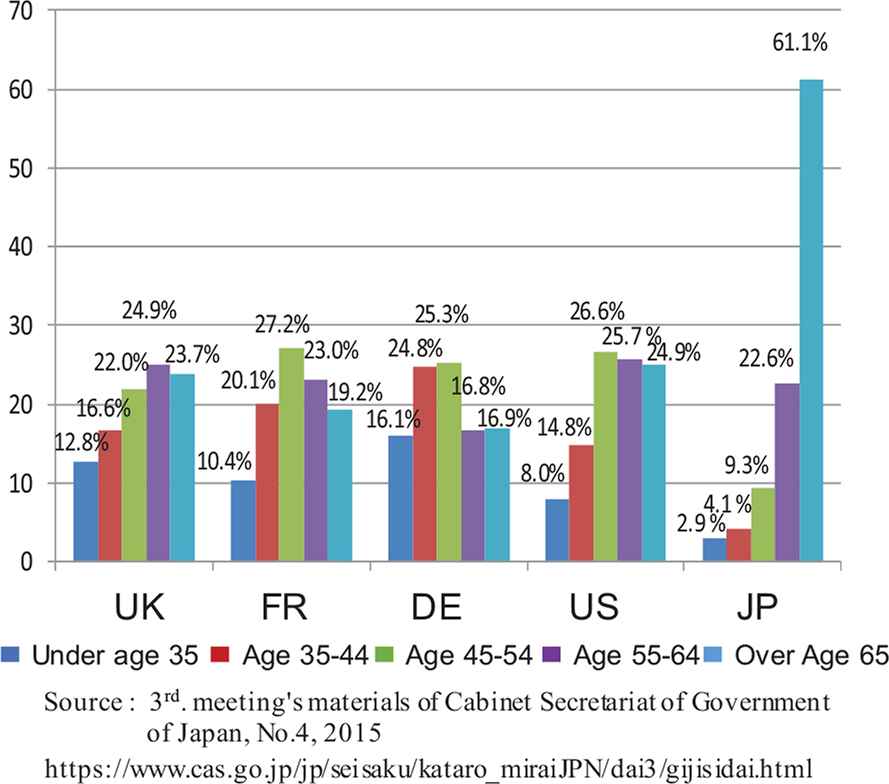
The age structure of farmer in each country. The Japanese farmers are more likely to be “mainly and significantly aged farmers”.
2.2. Agricultural Technology
Nowadays, it is important to improve the labor productivity and the local adaptability so that the agriculture product can be produced in quantity. The technology in the agriculture has promoted the introductions of management and automation system [5,6], environmental control for the green house like a plant factory, especially in The Netherlands. The plant factory cultivates plant in the facility utilizing artificial control of light, temperature, moisture, and carbon dioxide concentrations all year around. The producing crops almost are vegetables which are divided into fruit vegetable such as tomato, strawberry, cucumber or eggplant, and green vegetable such as lettuce, spinach, green onion and herbs.
Such a plant factory has the issues as follows:
- •
Almost all work is done from raising seedling to harvesting by hand.
- •
Initial cost and running cost.
2.3. Automation
All work from seedling to harvesting is difficult to automatically do by robotic technology because of the influence of light in the various situation [7–9]. It is important for robot to reduce and suppress the influence of light including infrared. The influence of light occurs due to regular reflection light bounces off from the smooth surface. If the intensity of the regular reflection increases, a color of object is recognized as different color. Human usually sees a color of the smooth surface from an angle occurring no regular reflection to reduce and suppress.
This phenomenon has various influences on the recognition for degree of mutilation of crop, controlling pests and inspect, crop disease diagnosing, robot’s posture and travelling for the harvesting [10] as shown in Figure 3.

The tomato harvesting robot picks a tomato. This robot can pick one of the tomatoes around 20 s.
2.4. Malaysia
In mainly Malaysia and Indonesia, the palm oil industry has developed more active with the palm plantation because oil palm is a kind of tropical plants is grown on a large scale as the commercial crops.
The infield FFB in the plantation of Sime Darby in Figure 4 has 2724 ha in Sepang Estate. This area’s acclivity occupies 42.5% (1158 ha) of 0–6 degree from flat to undulating, 19.4% of 6–12 degree.

The plantation and dropped fruit bunches in Sime Darby’s plantation.
In case of SD2 (1699 ha) in Sepang Estate, the mature oil palm area is broken into nine blocks to maintain the harvesting rounds within approximately 10 days.
The robot [11] has to be aimed autonomously 2–2.5 h/task (including traveling time), depending on a terrain and weather. If such robot can achieve, dozens of work rate and people would be reduced and provided more efficient to the plantation.
3. FORESTRY
Japan has one of the world’s largest forests, and the amount of the forests area accounts approximately 25 million ha and 66% of Japan’s land area of 37.8 million ha. However, the labor force population of Japan declines with the aging over the long term, and is about 45,000 people in 2015.
The forests in Japan are almost the plantation forests made by planting the seedings which cover the area of 10 million ha of the forests in Japan, and are consisted of Japanese cedar, Japanese cypress which are a type of leaved tree.
Although the forestry cycle is plant, glow and harvest, nowadays the Japanese government has promoted the cyclical use of the forests as circulative resources in Figure 5 in facing the all-out harvest of the plantation forests that will cause the vicious cycle in large scale logging as well as deterioration of the forest.
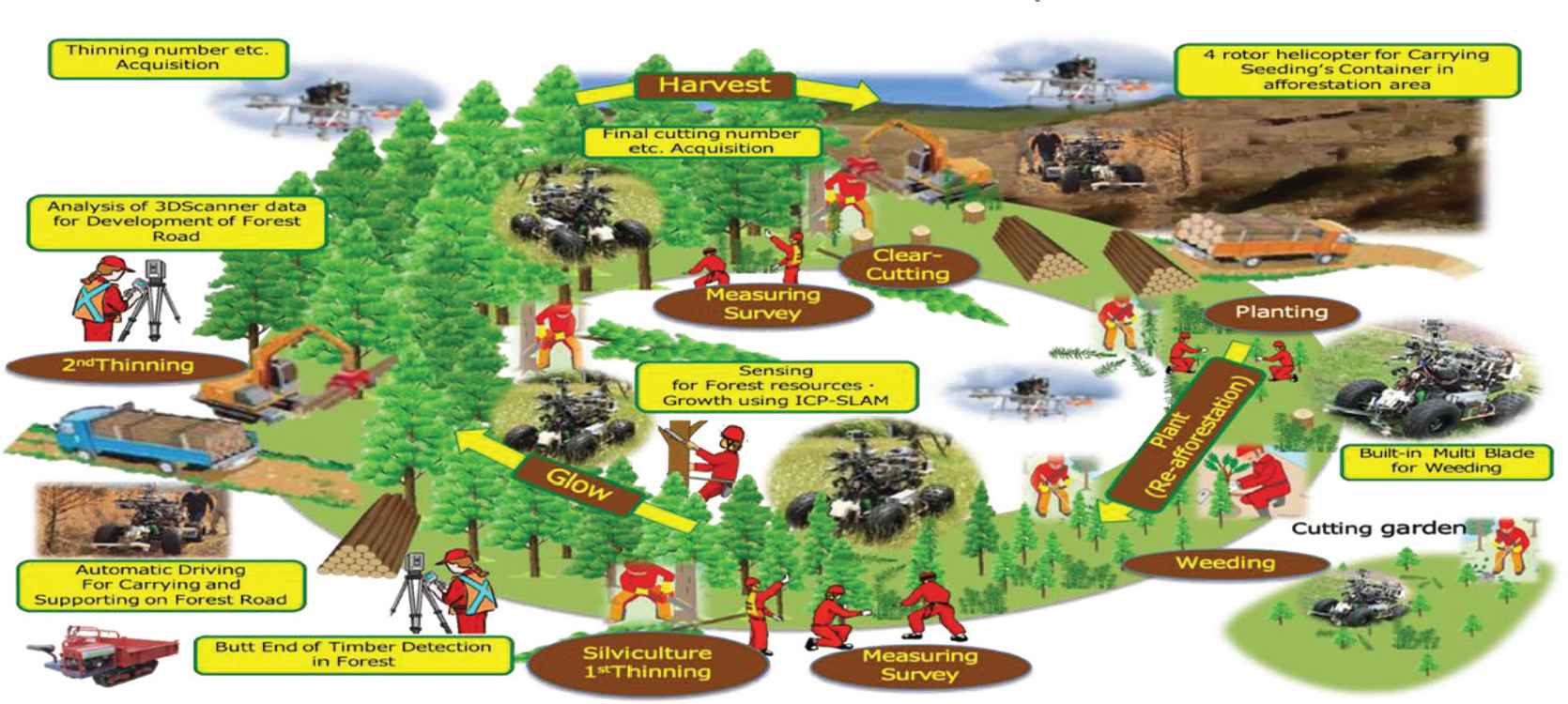
The cyclical use of the forests as circulative resources.
3.1. Forestry Technology
The forestry is needed as follows:
- •
Forest information system to measure the timber.
- •
Volume and the height of trees and to analyze the tree community in the forest.
- •
Carrying system of the pot for the seedings using the drone etc.
- •
Weeding robot [7] system for a steep mountain slope.
Since the Japanese mountain has the steep slope, the workers are too taught to operate the planting and the weeding under the blazing the sun as well as the forcing various painful work postures.
4. CONCLUSION
Recently, although there are various issues in global, robotics has potential for development and improvement to solve them using networks and AI. This paper described that there are only a few example of the agricultural and the forestry robots and systems as the field robotics and sensing system. As the related issues, the robotic technologies are needed the robotic arm for factory automation or food factory with less teaching and the autonomous motion using AI processing, the autonomous moving type robot for iron ores and cokes in ironworks, cleaning robot for the drifted garbage on the seashore and so on.
CONFLICTS OF INTEREST
The authors declare they have no conflicts of interest.
Author Introduction
Dr. Eiji Hayashi
 He graduated Doctor course at Division of Science and Engineering in Waseda University. He is a Professor in the Faculty of Computer Science and Systems Engineering in Kyushu Institute of Technology. He is now Deputy Executive Director in Kyushu Institute of Technology.
He graduated Doctor course at Division of Science and Engineering in Waseda University. He is a Professor in the Faculty of Computer Science and Systems Engineering in Kyushu Institute of Technology. He is now Deputy Executive Director in Kyushu Institute of Technology.
REFERENCES
Cite this article
TY - JOUR AU - Eiji Hayashi PY - 2019 DA - 2019/09/10 TI - Field Robot and Sensing System JO - Journal of Robotics, Networking and Artificial Life SP - 97 EP - 100 VL - 6 IS - 2 SN - 2352-6386 UR - https://doi.org/10.2991/jrnal.k.190828.005 DO - 10.2991/jrnal.k.190828.005 ID - Hayashi2019 ER -