
Junior High School Rescue Robot Challenge using Shock Sensitive Tiny Dummy Robot
- DOI
- 10.2991/jrnal.k.210713.004How to use a DOI?
- Keywords
- Rescue dummy; robot evaluation; technology education; Junior High School; ICT
- Abstract
The Junior High School Rescue Robot Challenge is an annual activity held by Hiroshima University with the sponsorship of a construction machinery company. Its 2020 theme was to convey injured people “tenderly” from the top of a half-demolished building to ground. We developed shock sensitive tiny dummy robot, controlled by M5Stack microcomputer since it rigged with accelerometer. The remote (wired) controlled robots developed by junior high school students conveyed the dummy and evaluated their performances including “tenderness” of the robots using the dummy.
- Copyright
- © 2021 The Authors. Published by Atlantis Press International B.V.
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. INTRODUCTION
Robot contest is an attractive activity for both students and instructors in junior high school technology education. Planning, processing, assembling and manipulating robots themselves make students foster a great deal of ingenuity and creativity. Such experiences can increase interest in today’s science and technology developments.
Several robot contests have been held in Japan [1–3], which are said to have been successful in fostering the capacities of invention, logical thinking and creativity in young participants. Those activities, on the other hand, focused on “winning or losing of a game” for the evaluation of the robots. The introduction of competition is a good way to arouse incentive in participants’ minds, but it also has the side effect of narrowing the view on the subject. Any robot contains complexity, regardless of the level of the product; they are not machines with a single function, and it is thus necessary to treat them as systems. Therefore, their evaluation must be systematic. In other words, it must be done from various viewpoints. It is worth remembering that the guideline for junior high school technology education (stated by the Ministry of Education, Culture, Sports, Science and Technology) also claims that we must deal with humanities in the context of the development of technologies. Manufacturing education must also include humanity development education; we must expect not only robots with high performance but also robots that can consider and cooperate with others.
In this context, we abandoned the word “contest” from our robot activity and chose “challenge” as an alternative. The faculty of Education at Hiroshima University held the “Rescue Robot Challenge” in 2014 for junior high school students [4]. It had formerly been named “Rescue Robot Contest” and had been held since 2003 with the aim of deepening their understanding of social issues and the relationship between people and robots through the creation of robots with an awareness of human tenderness [5].
The basic theme of our “challenge” is human rescue from disastrous conditions. Japan is known to be an earthquake-prone country; for instance, in recent years, it has faced the Kumamoto Earthquake in 2016, the Hokkaido Eastern Iburi Earthquake in 2018, among others. It is therefore natural to desire a rescue robot. In this paper, we describe the theme, results, and evaluation points of the “challenge” held in 2020. In particular, we have developed a new dummy to evaluate the tenderness. The previously developed dummy equipped tilt sensor which could just switch on when the tilting angle exceeded a given value. The data from the tilt sensor was not just a ON/OFF value, was sufficient to evaluate exactly magnitude of the shocks. The current dummy, on the other hand, equipped acceleration sensors which could evaluate quantitively the magnitude of vibration, so that we could utilize the data for evaluation of the tenderness of the rescue robots.
2. CHALLENGE THEME IN 2020
From the era of the “contest,” our activity has used the theme of “quickly rescuing a dummy doll (of 1/8 of real human) from a simulated earthquake site and transport it to a safety zone.” The time of rescue has been evaluated as basic data; however, ideas for rescuing methods and humanitarian standpoints have also been evaluated-in particular, by focusing on the “tenderness” of the robots to the doll during evacuation.
In 2020, we developed a small shock-sensitive dummy robot. The dummy was placed on remote (wired) controlled robots developed by middle school students, and it checks how many shocks and/or vibrations are given during evacuation. The dummy was placed horizontally on rescue robots. There were no wired nor remote controllers. The dummy could automatically accumulate the data in it during rescue trials.
Figure 1 shows the rescue field used in 2020. The robots, along with the dummies, are set in the starting area on the roof of the half-demolished building. Then, the robots start to rescue dummies passing through Zones A–C. They can choose different routes in Zone B: (i) stairs, (ii) a gap with vertical walls and (iii) a steep slope. There are obstacles on the ground (Zone C). The robots finally arrive at the safety zone.
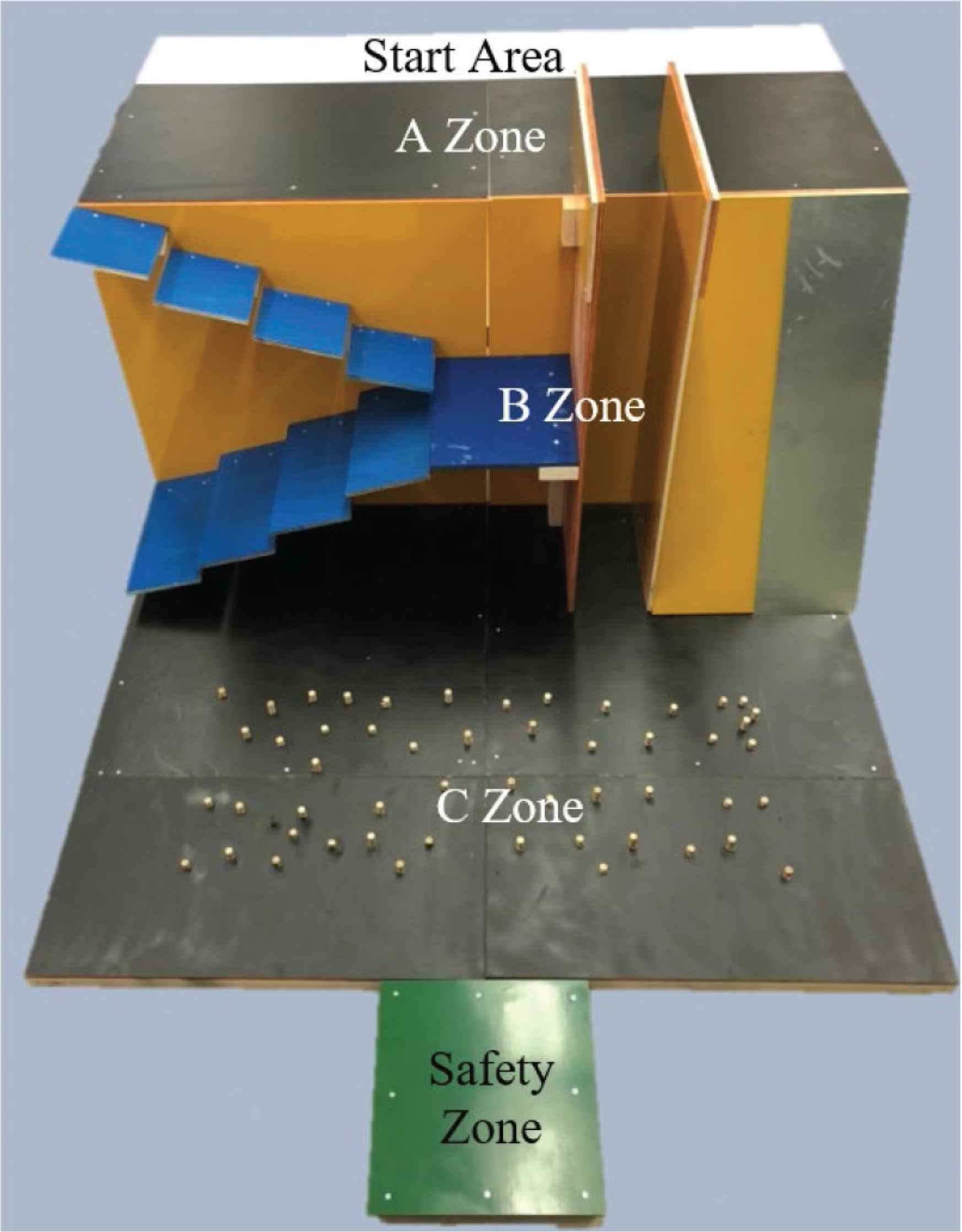
Rescue field.
A team consists of 2–5 members of junior high school students. Every team first gave a 4-min presentation using a screen showing the characteristics of the robot that they had developed, followed by a 3-min rescue activity using a real field.
3. DEVELOPMENT OF RESCUE DUMMY
For simplicity, we used a small tapper box (83 mm in length, 83 mm in width, and 45 mm in height) as the dummy’s body (Figure 2), although there were no protrusions representing the legs, arms, or head. We chose a microcomputer module of M5Stack (Figure 3) as the controller because it was equipped with accelerometers. The gross weight of the dummy was 81 g.
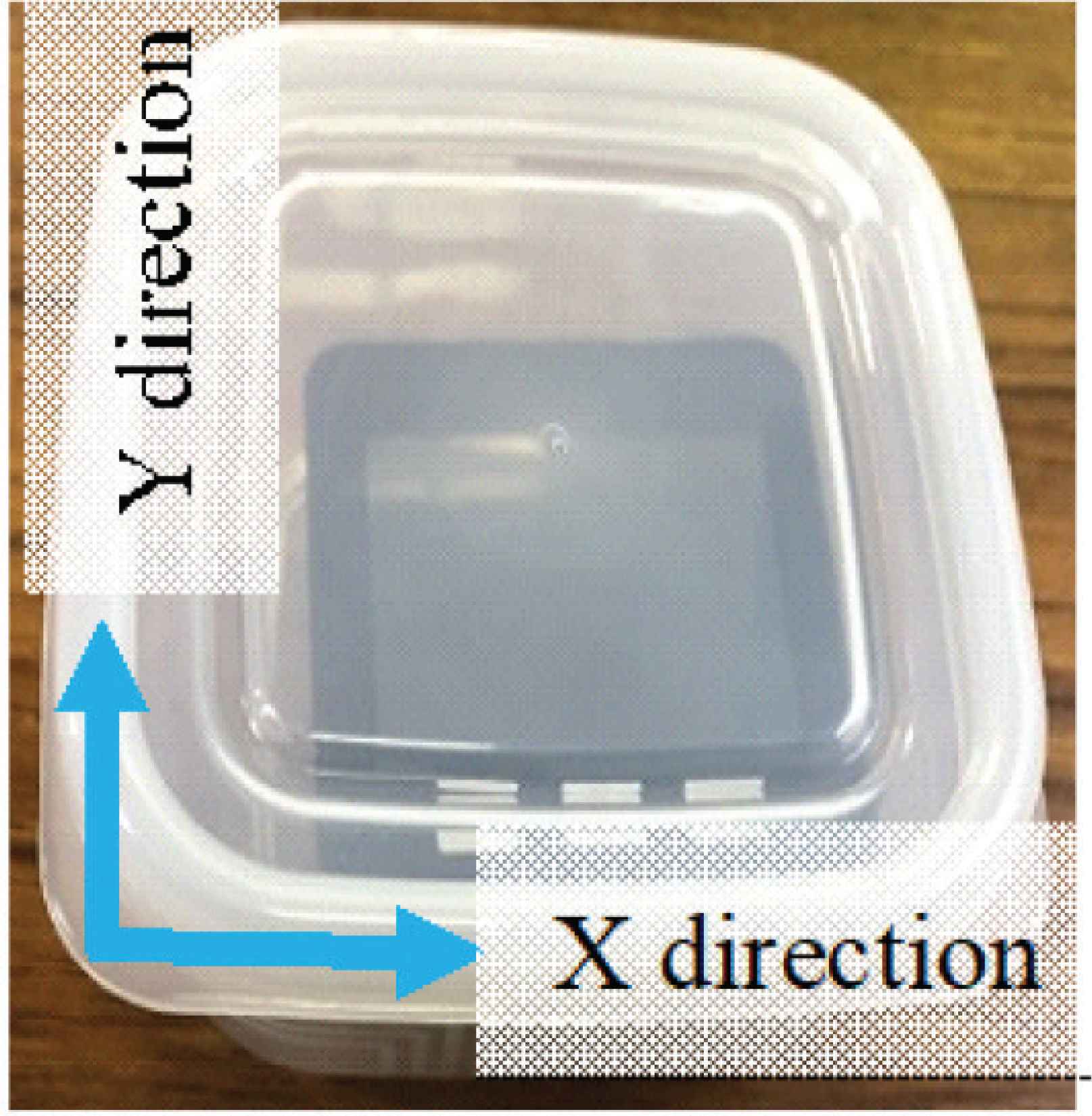
Rescue dummy with M5STACK.
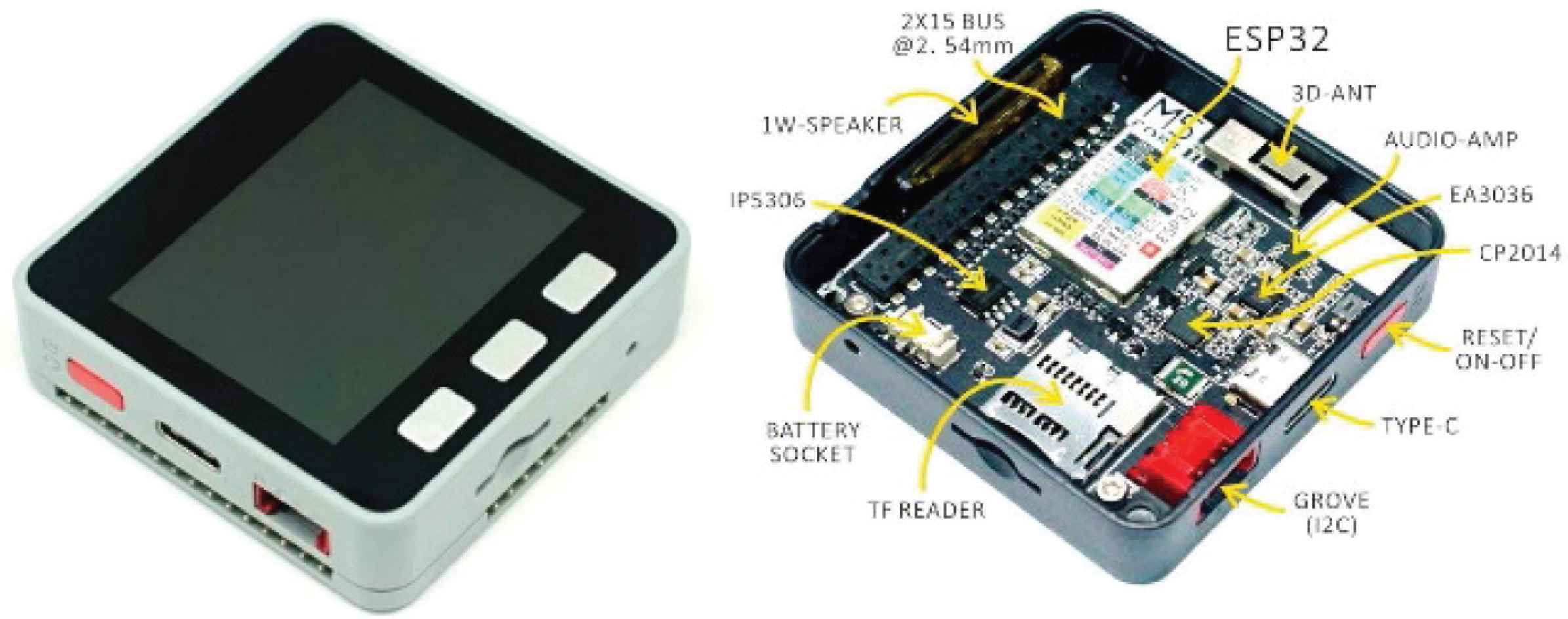
M5Stack with accelerometer.
We set the thresholds of the accelerometer to ±1.5 g (m/s2) in the X- and Y-directions. We just took data on X and Y axes vibrations for simplicity. We did not take data on rolling or pitching. It was scarcely happened vibrations just on Z-axis during rescue operations. Most of the vibrations were combined with three X-, Y- and Z-axes. A pure Z-axis movement observed in the rescue operation was merely fell down of the robot from building and it was easy to be noticed by the judge. When the dummy has two acceleration of threshold or more, the liquid crystal display of the M5Stack turned red and emitted with a warning sound. Introduction of the dummy equipped with an accelerometer made possible to evaluate the degree of tenderness of the robot toward the dummy.
4. RESULT OF “CHALLENGE” AND EVALUATION
The 6th Rescue Robot Challenge in 2020 was held on February 16, 2020 (still in the 2019 fiscal year). A total of 11 teams participated in the study. The points obtained are summarized in Table 1. The performances of the robots were evaluated from two viewpoints, (i) goal points and (ii) tenderness points. The maximum points of each viewpoint were 20, and that the maximum total points were 40. For the goal points, if the robot delivered the dummy to the safety zone in 3 min without dropping it, it received 20 points. The goal points decrease according to the degree of problems that occurred during the rescue activity.
| Rescue robot | A | B | C | D | E | F | G | H | I | J | K |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Goal points | 0 | 0 | 20 | 0 | 0 | 0 | 20 | 20 | 20 | 0 | 0 |
| Tenderness points | 20 | 15 | 5 | 20 | 20 | 0 | 20 | 15 | 15 | 20 | 20 |
| Total points | 20 | 15 | 25 | 20 | 20 | 0 | 40 | 35 | 35 | 20 | 20 |
Goal points and tenderness points for each rescue robot
For the tenderness points, 20 points were given if no warning sound was made, 15 points for one to three warnings, 10 points for four to six warnings, five points for seven to nine warnings, and zero points if warnings were more than 10.
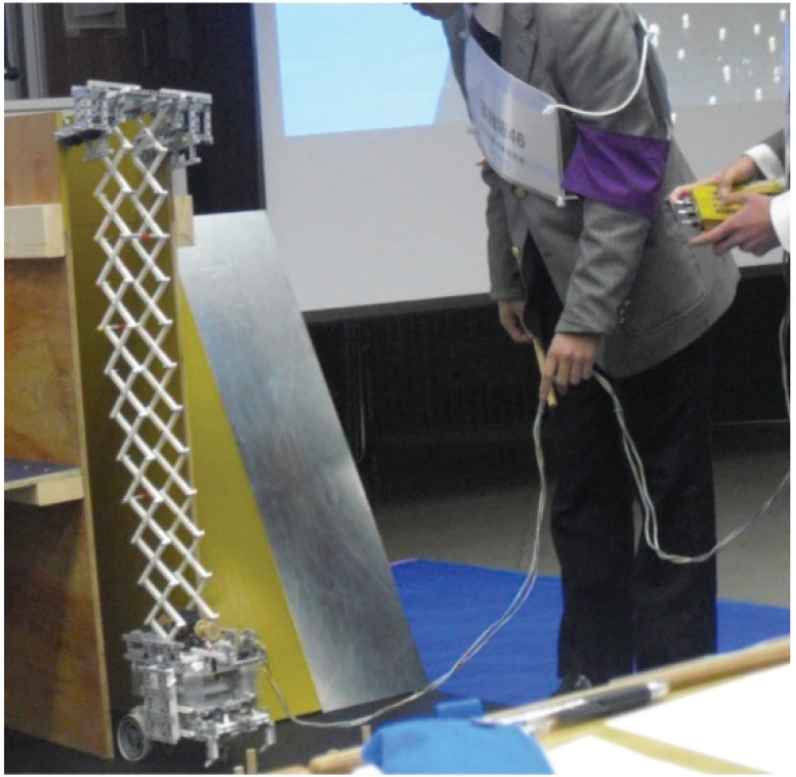
Let us consider an example. Rescue robot C is shown in Figure 4. Robot C succeeded in transporting the dummy to the safety zone without dropping it, and it achieved a goal point of 20. On the other hand, Robot C gave 14–19 shocks to the dummy; therefore, the tenderness points decreased significantly. This robot used magnets to slowly descend the steel slope in Zone B. The trials were successful in practice; however, unfortunately, the magnet fell off from the steel slope in the final performance, resulting in a large shock to the dummy.

Rescue robot C.
In contrast, rescue Robot G (Figure 5) could transport the dummy without giving shocks. This robot used a pantograph mechanism to descend between the gaps of the two walls in Zone B.
Rescue robot G.
Another interesting idea was found in Robot H (Figure 6). It used crawlers to travel the stairs in Zone B, which resulted in a speedy transportation of the dummy to the goal. Although it gave several shocks to the dummy, the number and degree of the shocks were much lower than those of other robots that chose the stairs in Zone B. Long arms had been ingeniously attached to its front and back, by which the robot could prevent staggering.

Rescue robot H.
5. DISCUSSION
The 11 rescue robots can be classified according to the descending rout in Zone B. Type 1 robot chose the gap between the two walls. Six robots (A, B, E, G, I, and J) chose this method. Type 2, four robots D, F, H, and K chose the stairs. Only Robot C was classified as Type 3 and descended a steel slope using a magnet, as explained in the previous section.
The average goal points of Type 1–3 were 6.67, 5, and 20 points, respectively, indicating that Type 3 had higher manipulability during transportation in Zone B. On the other hand, the mean tenderness points for Types 1–3 were 18.33, 13.75, and 5 points, respectively. A comparison of the points made clear that the robots of Type 1 had higher stability during transportation in Zone B. Nonetheless, there were no considerable differences in the averages of the total points between Type 1– 3, which were 25, 18.75, and 25 points, respectively. These results may indicate a shortcoming of evaluation from a single factor. As mentioned before, the robots essentially contain “complexity” in their design, mechanism, manipulating manner, and so on; therefore, their performances must also be evaluated from various aspects.
6. CONCLUSION
We developed a dummy robot for “Rescue Robot Challenge in 2020.” The dummy variable was sensitive to shocks during rescue transportation. The introduction of a shock-sensible dummy made possible to quantitatively evaluate the “tenderness” of the robots developed by the junior high school teams, and adding evaluation factors can improve the accuracy of their performance evaluation.
CONFLICTS OF INTEREST
The authors declare they have no conflicts of interest.
ACKNOWLEDGMENTS
The Junior High School Rescue Robot Challenge is carried out by co-sponsorship of Kobelco Construction Machinery Co., Ltd., and Hiroshima University. We gratefully acknowledge the support for execution of the Challenge by Kobelco Construction Machinery Co., Ltd.
AUTHORS INTRODUCTION
Dr. Kazuo Kawada
 He received his PhD degree at Graduate School of Education in Hiroshima University. He is an Associate Professor in the Graduate School of Humanities and Social Sciences, Hiroshima University.
He received his PhD degree at Graduate School of Education in Hiroshima University. He is an Associate Professor in the Graduate School of Humanities and Social Sciences, Hiroshima University.
Mr. Keita Murai
 He received his B.Ed. degree in Education in 2020 from the Faculty of Education, Hiroshima University. He is acquiring the M.Ed. in the Graduate School of Humanities and Social Sciences, Hiroshima University.
He received his B.Ed. degree in Education in 2020 from the Faculty of Education, Hiroshima University. He is acquiring the M.Ed. in the Graduate School of Humanities and Social Sciences, Hiroshima University.
Mr. Keisuke Iuchi
 He received his B.Ed. degree in Education in 2019 from the Faculty of Education, Hiroshima University. He is acquiring the M.Ed. in the Graduate School of Humanities and Social Sciences, Hiroshima University.
He received his B.Ed. degree in Education in 2019 from the Faculty of Education, Hiroshima University. He is acquiring the M.Ed. in the Graduate School of Humanities and Social Sciences, Hiroshima University.
Dr. Hiroyuki Y. Suzuki
 He received his Doctor of Engineering degree at Graduate School of Engineering in Hiroshima University. He is an Associate Professor in the Graduate School of Humanities and Social Sciences, Hiroshima University.
He received his Doctor of Engineering degree at Graduate School of Engineering in Hiroshima University. He is an Associate Professor in the Graduate School of Humanities and Social Sciences, Hiroshima University.
REFERENCES
Cite this article
TY - JOUR AU - Kazuo Kawada AU - Keisuke Iuchi AU - Keita Murai AU - Hiroyuki Y. Suzuki PY - 2021 DA - 2021/07/23 TI - Junior High School Rescue Robot Challenge using Shock Sensitive Tiny Dummy Robot JO - Journal of Robotics, Networking and Artificial Life SP - 90 EP - 93 VL - 8 IS - 2 SN - 2352-6386 UR - https://doi.org/10.2991/jrnal.k.210713.004 DO - 10.2991/jrnal.k.210713.004 ID - Kawada2021 ER -