
Control Performance Assessment Method as Assessment of Programming Learning Achievement
- DOI
- 10.2991/jrnal.2018.5.3.8How to use a DOI?
- Keywords
- Programming learning; control performance assessment; minimum variance; learning achievement
- Abstract
It is an important problem how to estimate the learning achievement of the programming learning. However, the quantitative evaluation method according to learning achievement is difficult. On the other hand, “work” of a control program influences the control performance of the plant by the petrochemical industry, and to have an influence on the operation cost. Improvement of a program and am planning for productivity improvement are suggested by evaluating the control performance quantitatively. This research considers the using control performance assessment method for the achievement value of the programming learning.
- Copyright
- © 2018 The Author. Published by Atlantis Press SARL.
- Open Access
- This is an open access article under the CC BY-NC license (http://creativecommons.org/licences/by-nc/4.0/).
1. INTRODUCTION
It is an important problem how to estimate the learning achievement of the programming learning. However, the quantitative evaluation method according to learning achievement is difficult. On the other hand, “work” of a control program influences the control performance of the plant by the petrochemical industry, and to have an influence on the operation cost, improvement of a program and am planning for productivity improvement are suggested by evaluating the control performance quantitatively. The idea of control performance assessment is becoming important in the process control area [1–3]. This research considers the using control performance assessment method for the achievement value other the programming learning.
2. CONTROL PERFORMANCE ASSESSMENT
The judgment of whether a controller is showing the desirable performance has been formed out of the subjectivity of the expert operator familiar with a plant concerned in the past. There is an index of rising time, the overshoot amount and an attenuation vibration characteristic as the quantitative control performance index of the controller. However, these indexes can be obtained in the transient state which is at the time of a set value change. The controlled value of the process control system represented by the petrochemical plants can give the reference value as the constant value to the temperature, the pressure, and the flow rate. In this case, the steady state control performance which is the minimizing the control error variance is more important than the target value tracking performance or the disturbance reply. For example, in the system of temperature control to keep the constant value of temperature as shown in Figure 1, it is required to keep the temperature higher than some point. It is necessary to set the high reference value to keep the minimum temperature before the adjustment indicated on Figure 1 left side. It is possible to reduce the output variance after the adjustment indicated on Figure 1 right side, and even if the target value lower than the before adjustment, it is possible to keep the minimum temperature. The energy the adjustment back requires more than this case and before an adjustment can be done small. Thus it is sometimes tied with the efficiency of the energy to disperse a control error small.
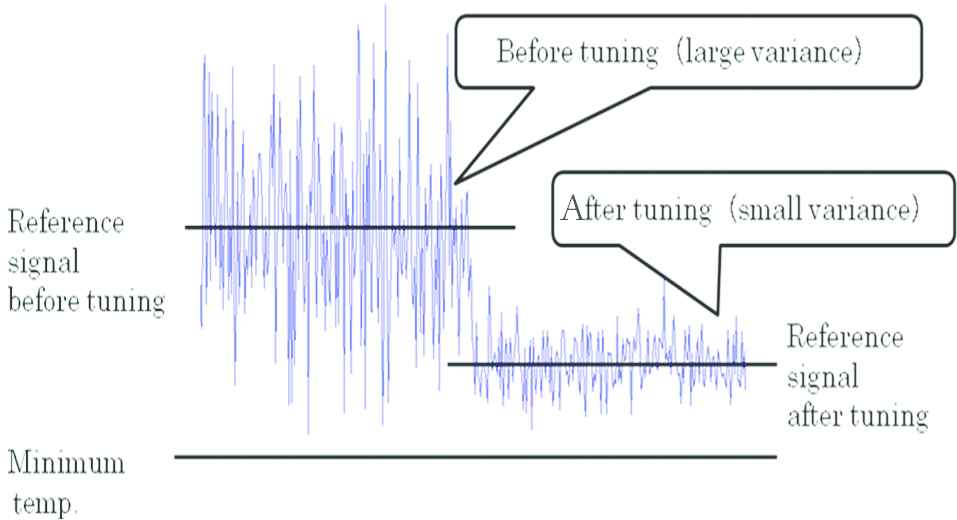
The example of the temperature control systems
These ways have the method based on the benchmark of the minimum variance control [4], the method to consider a fluctuation of the manipulated value as well as output error [5], the method to express the control performance to compare with data in the past in a plant concerned, and the way to limit the structure of the controller for example the a model based predictive control or PID control and express the control performance in the structure.
This research defines the good program makes the good control which realizes the small output variance.
3. MV-INDEX
This section introduces the calculation of MV-index which is proposed by Desborough and Harris [6].
The generalized controlled object described as the following Eq. (1).
Here,
Furthermore, minimum-variance control performance assessment index η is shown by the following Eq. (11):
MV-index η can be calculated by Eq. (11). However, the numerator of Eq. (11) cannot be calculated directly. This term is obtained as the following procedure.
The following equation can be derived by multiplying z−d for both sides of Eq. (10).
These are expressed as [Eqs. (18)–(21)]:
The parameters of Eq. (20) can be obtained by:
4. SIMULATION EXAMPLE
This section demonstrates the effectiveness of the proposed scheme by a simulation example. The following Eq. (24) are used as the controlled object:
The following Eq. (25) is obtained as follows:
First, the ON–OFF control expressed as the following rule (26) was used for the controlled object (25).
Figure 2 is the control result by using the ON–OFF control. And MV-index is 0.0208 which calculated on 200 ≤ t ≤ 1200.

The result of the ON–OFF control
Next, the following PID control method (27) is used.
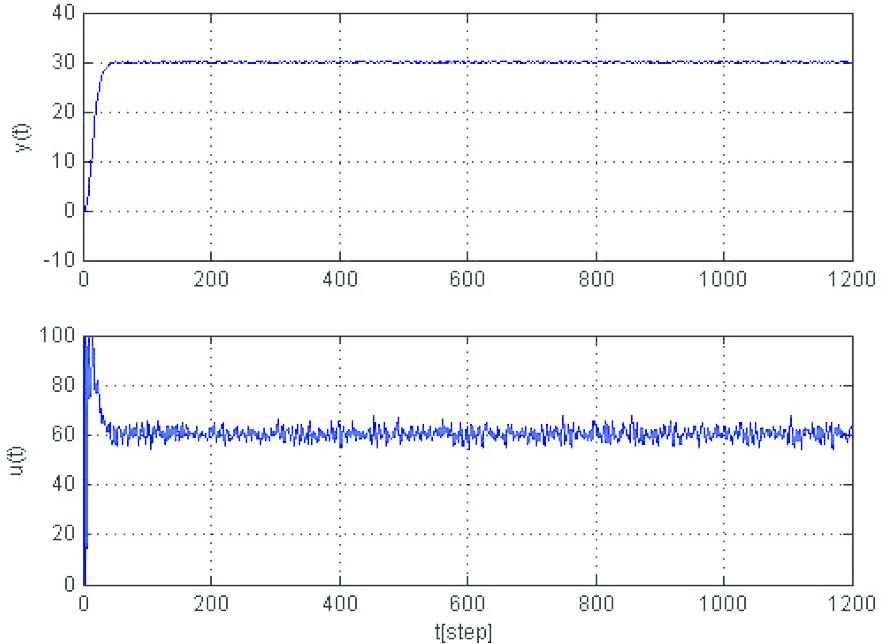
The result of the PID control
From the result of Figure 2, the input value is very oscillatory. The variance of the output value becomes large by the oscillatory input. From Figure 3, the variance of the output signal becomes small by the PID control. The MV-index can be the good metric to evaluate the programming performance.
5. CONCLUSION
This paper considers the using control performance assessment method for the achievement of the programming learning. In this paper, a method based on the controller performance assessment was proposed.
The effectiveness of the proposed method was evaluated by the simulation example.
ACKNOWLEDGMENT
This work was supported by JSPS KANKENHI (Grant Number 18K02980).
Author Introduction
Dr. Yoshihiro Ohnishi
 He received his B.E. and M.E. from Okayama Prefectural University in 1997 and 1999, respectively. And he received his Dr. Eng. from Osaka Prefecture University in 2002. He is an associate professor at Faculty of Education in Ehime University. He is a member of SICE, ISCIE, IEEJ and IEEE.
He received his B.E. and M.E. from Okayama Prefectural University in 1997 and 1999, respectively. And he received his Dr. Eng. from Osaka Prefecture University in 2002. He is an associate professor at Faculty of Education in Ehime University. He is a member of SICE, ISCIE, IEEJ and IEEE.
REFERENCES
Cite this article
TY - JOUR AU - Yoshihiro Ohnishi PY - 2018 DA - 2018/12/01 TI - Control Performance Assessment Method as Assessment of Programming Learning Achievement JO - Journal of Robotics, Networking and Artificial Life SP - 180 EP - 183 VL - 5 IS - 3 SN - 2352-6386 UR - https://doi.org/10.2991/jrnal.2018.5.3.8 DO - 10.2991/jrnal.2018.5.3.8 ID - Ohnishi2018 ER -