
Ocean Current Velocity Measuring Device Based on Acoustic Time Difference Current Meter
- DOI
- 10.2991/jrnal.k.200909.007How to use a DOI?
- Keywords
- Ocean current; flow velocity; current meter; acoustic measurement
- Abstract
Ocean current refers to the relatively stable flow of the surface water of the ocean in a certain direction, and is the main regulator of the thermal environment on the surface of the earth. At present, the ocean current velocity detection at sea is basically a field measurement by a staff member in a boat, and the adjustment of the detector position during the measurement process is very inconvenient. This paper designs a new submarine current velocity measuring device that includes the measuring ship, cable, fixed anchor and ocean current velocity detector. The cable on the reel is retracted through the cable retracting room, and the end of the cable is fixedly provided with a fixed anchor. The fixed anchor is fixedly provided with a plurality of ocean current flow rate detectors, which have a built-in control chip, a wireless communication module, and Pressure Sensor. The ocean current detector adopts the acoustic time difference current meter, which runs stably and is the most widely used current meter at present. This device can flexibly adjust the depth of the detector according to actual needs, so as to measure the flow velocity of different depths.
- Copyright
- © 2020 The Authors. Published by Atlantis Press B.V.
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. INTRODUCTION
In order to develop and utilize the ocean, people have conducted the long-term observation and research on the ocean. Among them, the current velocity is a very important parameter in marine hydrological research. It is very important to grasp the law of seawater flow, which can directly serve national defense, marine transportation, fishery, and port construction.
Ocean currents refer to the relatively stable flow of large-scale ocean surface waters in certain directions throughout the year. Ocean currents are the main regulators of the thermal environment on the Earth’s surface, which can be divided into the warm currents and cold currents. If the temperature of the ocean current is higher than the water temperature reaching the sea area, it is called warm current; if the temperature of the ocean current is lower than the water temperature reaching the sea area, it is called cold current [1]. Generally, the ocean current flowing from the low latitude to high latitude is the warm current, and the ocean current flowing from the high latitude to low latitude is the cold current. Sea vessels sailing along the ocean current can save fuel and speed up. But when the warm and cold currents meet, sea fog often forms, which is not good for sea navigation. In addition, ocean currents carry icebergs south from the Arctic, posing a greater threat to maritime shipping. The main global currents are shown in Figure 1.
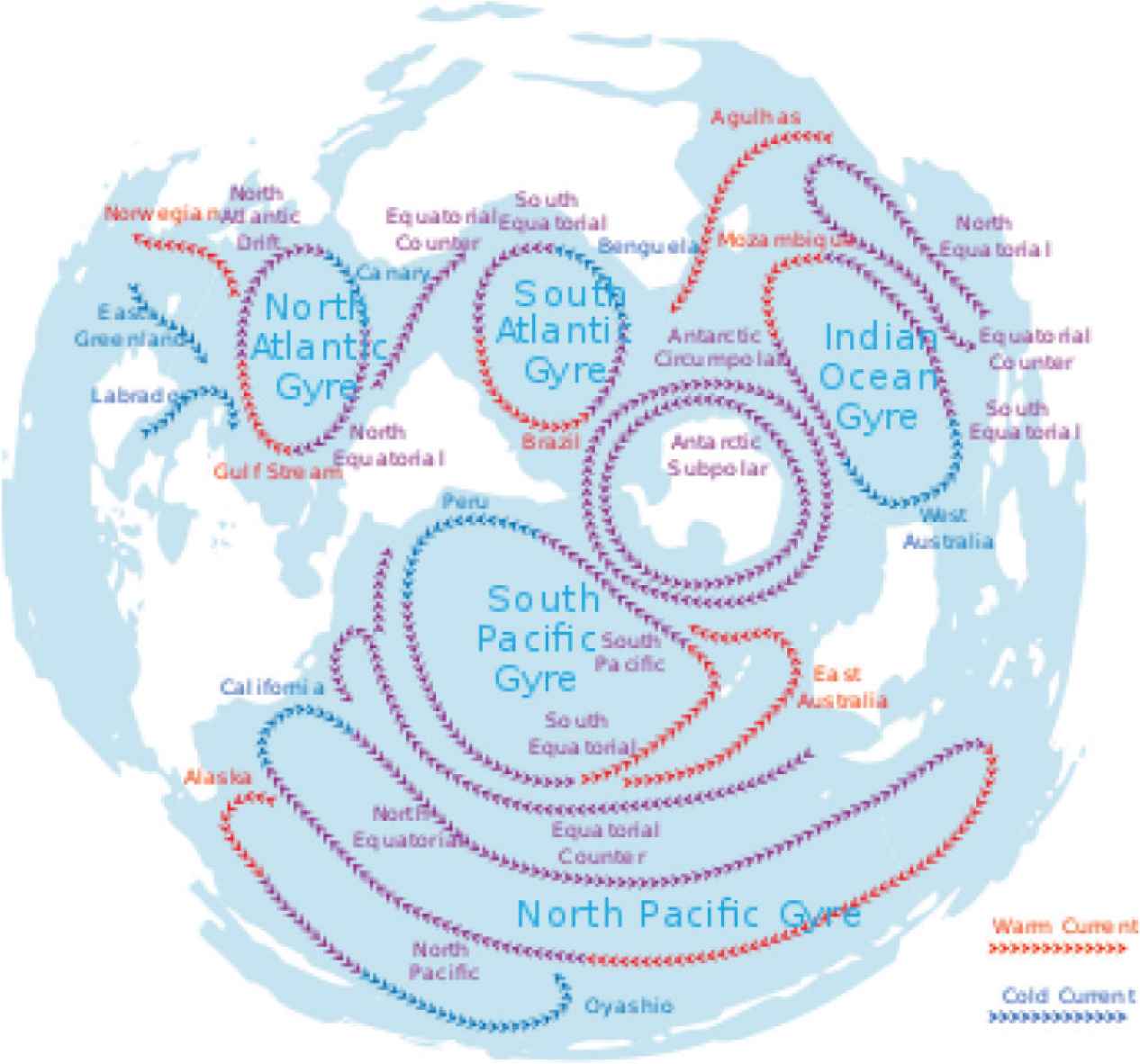
The main global currents.
With the continuous development of science and technology and marine science itself, the methods of observing ocean currents have also been continuously improved and improved. From the original drift bottle to modern ocean current meters, a large variety of current measuring instruments have been invented.
The current meter is a kind of instrument to measure the velocity and direction of seawater. It is installed on Argo buoys, anchoring data buoys, submersible buoy, seabed base, autonomous underwater vehicle, underwater glider, survey ship and other marine current measurement platforms for current observation.
Recently, with the increasing improvement of the digital signal processing technology, and the technologies of the optical fiber, laser, graphics and image processing, and computer technology, the flow velocity measurement technology has also undergone new developments, and a series of new flow velocity measurement methods are appeared, such as the flow velocity measurement by the acoustic Doppler, laser Doppler, radio wave velocity, particle imaging velocity field measurement, etc. [2].
Particularly, the acoustic flow measurement becomes the most widely used solution in ocean velocity measurement with its unique advantages. At the same time, the study of acoustic current measurement technology is of great significance for exploring new approaches to ocean current measurement technology. All kinds of current meters have their own characteristics. In the future, the acoustic current meters will be the main part of the current measurement, and a variety of types of current meters will coexist.
At present, the detection of ocean current velocity at sea is basically carried out by staff taking a boat to perform field measurements. However, it is inconvenient to adjust the position of the detector during the measurement [3]. It is prone to deviations due to the measurement of the device, so it is necessary to design a submarine ocean current speed measurement device to solve these problems.
2. DEVICE DESIGN
In this paper, a new submarine ocean current speed measurement device is designed in Figure 2, which includes a measuring boat, cable, fixed anchor, and ocean current velocity detector. The cable on the reel is retracted through the cable storage room. The end of the cable is fixedly provided with a fixed anchor, which is also fixedly provided with a plurality of ocean current velocity detectors. This device can flexibly be adjusted according to actual needs in order to measure the ocean current velocity at different depths.
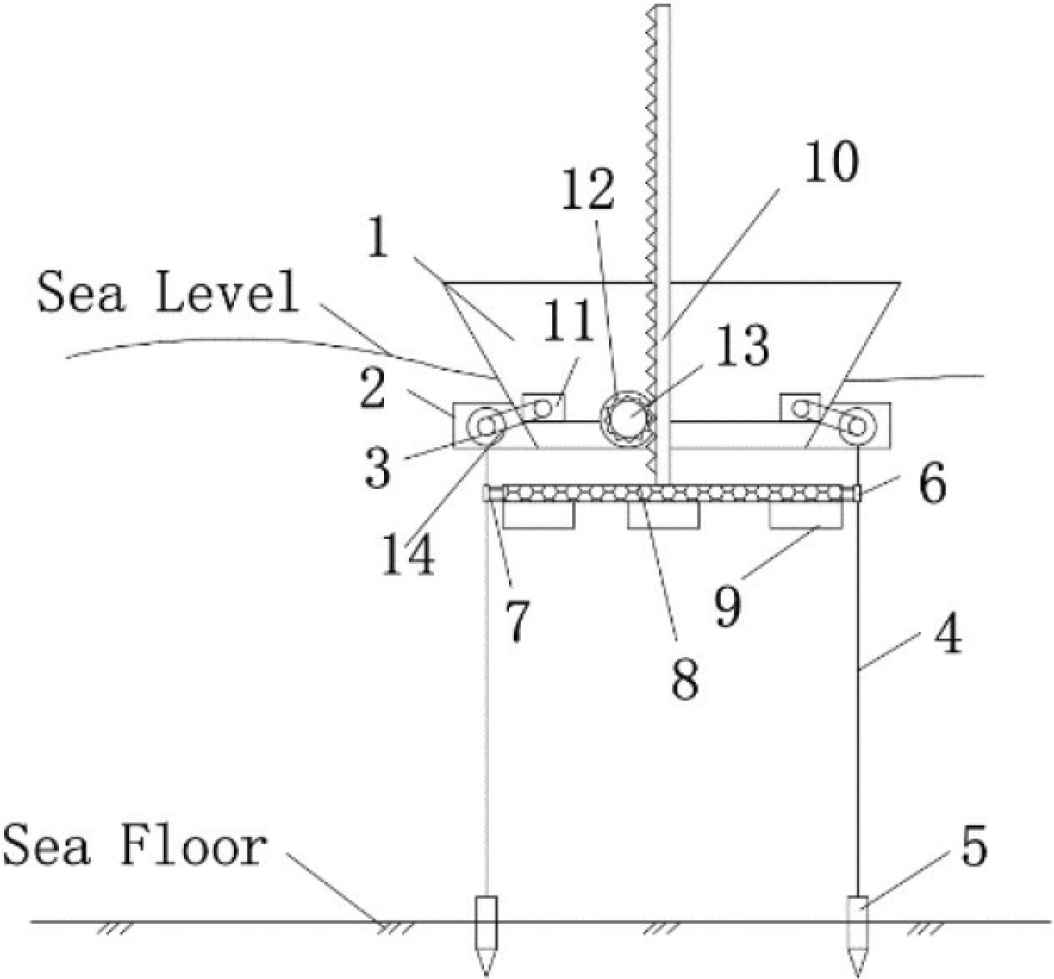
Structure of submarine ocean current speed measurement device.
2.1. Structure Design
In Figure 2, No. 1 indicates the measurement ship; No. 2 is the cable storage room; No. 3 indicates the reel; No. 4 is the cable; No. 5 indicates the fixed anchor; and No. 6 is the sliding sleeve. Others are the fixed link No. 7, the sinking plate No. 8, the ocean current velocity detector No. 9, the rack No. 10, the first motor No. 11, the second motor No. 12, the gear No. 13 and the transmission belt No. 14.
The structure of ocean current velocity detector is shown in Figure 3. No. 15 indicates a waterproof case, and others are control chip No. 16, wireless communication module No. 17, pressure block No. 18, pressure sensor No. 19, connecting rod No. 20 and a suspension No. 21.
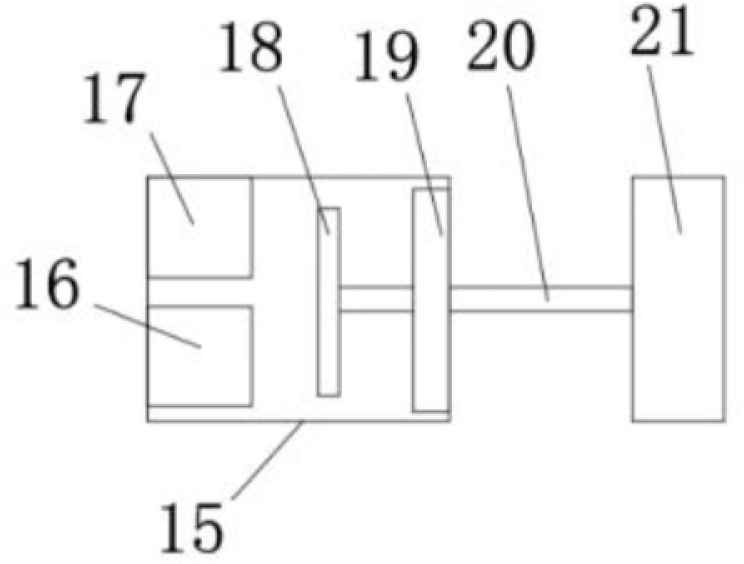
Design of ocean current velocity detector.
2.2. Instructions
The submarine current velocity measuring device includes a survey ship, cable, fixed anchor and ocean current velocity detector. A rewinding reel is provided by rotating inside the cable retracting room, and the reel is wound with a cable. The end of the cable is fixed with a fixed anchor. Two cables are provided with a sliding sleeve. The fixing rod is fixedly connected to the sinking plate. Several ocean current velocity detectors are fixedly arranged below the sinking plate. A rack is fixedly arranged above the sinking plate, and the side of the rack is fixed with a second motor. The output end of the second motor is fixed with a gear, and the gear meshes with the rack.
The device is enclosed with a waterproof shell, and a control chip is installed inside the shell. A wireless communication module and a pressure sensor module are arranged on one side of the control chip [4]. The depth of the detector can be flexibly adjusted according to the actual needs, so that the ocean current velocity at different depths can be measured. At the same time, the ocean current velocity detector is provided with at least three sets, and the average of three results measured by the detectors is used as the measurement data, which can further improve the accuracy of the measurement.
3. SPEED MEASUREMENT PRINCIPLE
Acoustic waves are the propagation of energy in medium. Ultrasonic pulse signals generated by piezoelectric ceramic transducers are propagated in the seawater medium in the form of phase velocity [5]. When the seawater medium itself has velocity, the sound waves travel downstream at the same distance. It is not the same as the time of countercurrent propagation [6].
The principle is that, under the condition of the same acoustic propagation distance, the velocity of seawater can be calculated by measuring the time difference between the two acoustics propagation in the upstream and downstream.
The schematic diagram of the propagation plane is shown in Figure 4, where A and B are the transceiver and replacement energizer, c is the ocean sound velocity at the measurement point, v is the velocity of the seawater, and d is the distance (channel axis distance) between the two transducers.
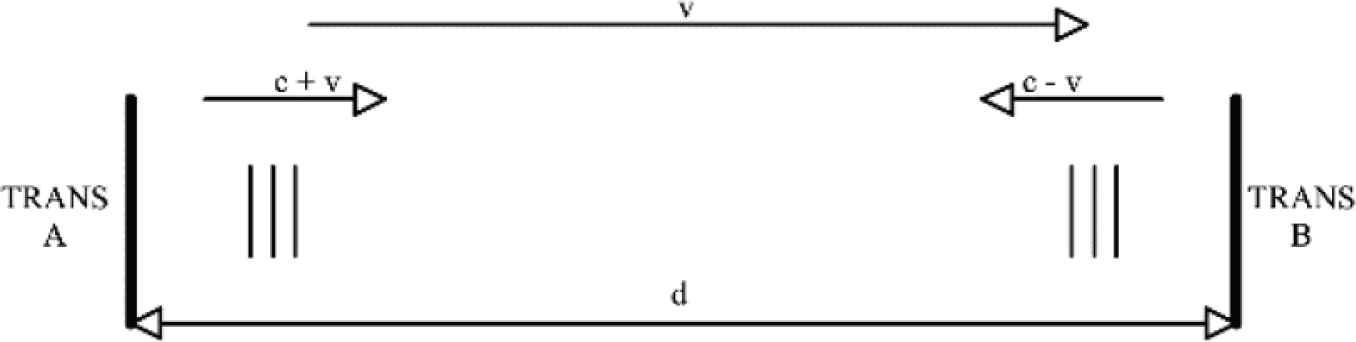
Speed measurement schematic.
During the measurement, the transducer pairs are excited by the same electrical signal, that is, the two transducers transmit ultrasonic waves at the same time, and are ready to receive signals arriving at each other. Due to the existence of the velocity v, the ultrasonic pulse signals that cause the forward and backward propagation will not reach the transducer receiving surface at the same time [7]. According to the theory of sound wave retransmission in a fluid medium, it is known that the propagation time of the short ultrasonic pulses along the countercurrent and the countercurrent directions on the biological axis are:
Downstream travel time:
Countercurrent propagation time:
Time difference between downstream and upstream:
Flow value:
When c and d are known, as long as Δt is measured, the flow velocity v can be directly obtained. The error coefficient of this approximation is v2/c2.
If the speed of sound and velocity are calculated according to typical values, the error magnitude brought by this approximation is 4 × 10−7. The ocean velocity in the submarine boundary layer is generally very low, ranging from about 0.1 cm/s to about 1 m/s. Assuming that d = 10 cm and c = 1500 m/s, the time difference range calculated from Eq. (4) is 1.33 to 133 ns. Such small time difference can be ignored directly [8].
Its principle process is as follows: the ultrasonic signal is transmitted and received by the ultrasonic probe, and a series of processing processes such as conversion, amplification, operation and compensation of the signal are carried out to finally calculate the flow value that is measured. For different environment, different parameters need to be set up, the algorithms for these all by automatic adjustment, and can be set through the function display value of what we need, such as the flow rate of the sea, ocean of instantaneous flow rate and the accumulation of Marine traffic, device accumulation of running time, etc., which is very convenient to determine the ocean flow.
4. EXPERIMENT
We placed the designed ship and measuring equipment into the nearby ocean and measured the current velocity every 2 h. Each measurement records the current time, the depth of the device’s descent, and the ocean current velocity of the final measurement.
In Table 1, the ocean current velocity 1 is the velocity measured by the measuring device designed in this paper. In addition, for cross-sectional comparison, we simultaneously used two current velocity measuring devices made by other companies and sent them down to the same depth for measurement. Among them, flow velocity 2 was measured by using the 1 MHz Aquadopp Profiler current meter produced by Nortek company, and flow velocity 3 was measured by using the SLD stationary doppler current meter produced by Germany OTT company.
| Location | 108°37′8.15″E, 21°40′41.02″N | |||
|---|---|---|---|---|
| Data | 2019/11/2–2019/11/3 | |||
| Time | Sensor depth (m) | Velocity 1 (cm/s) | Velocity 2 (cm/s) | Velocity 3 (cm/s) |
| 12:00 | 4.8 | 23.0 | 23.2 | 23.0 |
| 14:00 | 4.0 | 41.0 | 41.5 | 41.0 |
| 16:00 | 3.0 | 28.6 | 28.0 | 28.4 |
| 18:00 | 2.5 | 17.7 | 25.6 | 17.5 |
| 20:00 | 2.1 | 4.6 | 4.5 | 4.6 |
| 22:00 | 2.3 | 25.0 | 25.2 | 25.0 |
| 0:00 | 3.2 | 17.8 | 17.8 | 17.5 |
| 2:00 | 3.5 | 6.1 | 6.3 | 6.0 |
| 4:00 | 3.7 | 13.9 | 13.8 | 13.9 |
| 6:00 | 3.9 | 16.1 | 16.0 | 16.1 |
| 8:00 | 4.1 | 20.3 | 20.3 | 20.8 |
| 10:00 | 4.4 | 6.5 | 6.4 | 6.5 |
| 12:00 | 4.5 | 6.2 | 6.5 | 6.3 |
Data of ocean current in Jingu River (China) area
Through data analysis, it can be obtained that the speed measurement method designed in this paper can effectively avoid abnormal measurement data and make the results more accurate.
5. CONCLUSION
Compared with the prior art, the device can flexibly be adjusted according to actual needs, so that the ocean current velocity at different depths can be measured. At the same time, there are at least three sets of ocean current velocity detectors, and the results measured by the three detectors are averaged as measurement data, which further improves the measurement accuracy.
CONFLICTS OF INTEREST
The authors declare they have no conflicts of interest.
ACKNOWLEDGMENTS
The research is partly supported by the
AUTHORS INTRODUCTION
Mr. Jichao Zhao
 He is a first-year master candidate in Tianjin University of Science and Technology. His research is about deep learning, pattern recognition.
He is a first-year master candidate in Tianjin University of Science and Technology. His research is about deep learning, pattern recognition.
Dr. Fengzhi Dai
 He received an M.E. and Doctor of Engineering (PhD) from the Beijing Institute of Technology, China in 1998 and Oita University, Japan in 2004 respectively. His main research interests are artificial intelligence, pattern recognition and robotics. He worked in National Institute of Technology, Matsue College, Japan from 2003 to 2009. Since October 2009, he has been the staff in Tianjin University of Science and Technology, China, where he is currently an Associate Professor of the College of Electronic Information and Automation.
He received an M.E. and Doctor of Engineering (PhD) from the Beijing Institute of Technology, China in 1998 and Oita University, Japan in 2004 respectively. His main research interests are artificial intelligence, pattern recognition and robotics. He worked in National Institute of Technology, Matsue College, Japan from 2003 to 2009. Since October 2009, he has been the staff in Tianjin University of Science and Technology, China, where he is currently an Associate Professor of the College of Electronic Information and Automation.
Mr. Xin Ma
 He received his bachelor’s degree from Henan Polytechnic University in 2016. The main research direction is the development and utilization of Marine automation equipment. Currently, he is working as an Assistant Engineer in the North Sea Marine environment monitoring center of the State Oceanic Administration.
He received his bachelor’s degree from Henan Polytechnic University in 2016. The main research direction is the development and utilization of Marine automation equipment. Currently, he is working as an Assistant Engineer in the North Sea Marine environment monitoring center of the State Oceanic Administration.
Ms. Fengkun Wang
 She is a junior at Tianjin University of Science and Technology. Her research is about computer vision, deep learning.
She is a junior at Tianjin University of Science and Technology. Her research is about computer vision, deep learning.
REFERENCES
Cite this article
TY - JOUR AU - Jichao Zhao AU - Fengzhi Dai AU - Xin Ma AU - Fengkun Wang PY - 2020 DA - 2020/09/14 TI - Ocean Current Velocity Measuring Device Based on Acoustic Time Difference Current Meter JO - Journal of Robotics, Networking and Artificial Life SP - 175 EP - 178 VL - 7 IS - 3 SN - 2352-6386 UR - https://doi.org/10.2991/jrnal.k.200909.007 DO - 10.2991/jrnal.k.200909.007 ID - Zhao2020 ER -