
Tracking Control of Mobile Robots based on Rhombic Input Constraints
- DOI
- 10.2991/jrnal.k.211108.011How to use a DOI?
- Keywords
- Differential wheeled mobile robots; rhombic input constraints; trajectory tracking; vector analysis
- Abstract
This paper focuses on the trajectory tracking control algorithm for Differential Wheeled Mobile Robots (DWMRs) based on rhombic input constraints. The kinematics and dynamics model of DWMRs are established, and vector analysis method is used to design the controller when the linear velocity and angular velocity of DWMRs were not mutually independently. Through the simulation of tracking 8-shaped curve, a good control performance is obtained.
- Copyright
- © 2021 The Authors. Published by Atlantis Press International B.V.
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. INTRODUCTION
Differential Wheeled Mobile Robots (DWMRs) are widely used in today’s society. There are many methods have been used in controller design for trajectory tracking. Sliding mode control [1], backstepping control [2], robust control [3], fuzzy control [4], active disturbance rejection control [5] etc. are used to solve tracking control problem. From a practical perspective, the input constraints must be considered when designing controller, but the current situation is that most of the research does not consider the mutual constraints relationship between the linear velocity v and the angular velocity ω of the mobile robot, they usually assume that the input constraints of the robots’ linear velocity v and angular velocity ω are mutually independently, that is, |v| ≤ m1, |ω| ≤ m2, where m1 and m2 are positive constants. The real situation is that input field of DWMRs is the rhombic area defined by |v/m| + |ωl/m| ≤ 1 as shown in Figure 1, and m represents the maximum velocity of two drive wheels, l represents half of the distance between the two drive wheels, the proof process will be given later. If a differential wheeled mobile robot uses the controller designed in Su and Zheng [6], the rectangular area where v and ω are independently needs to be obtained from the rhombic area mentioned above, it can be determined by |v| ≤ m/2 and |ω| ≤ m/2l. So we can see that the actual area where v and ω are mutually independently is only half of the hypothetical rectangular area. Also the mobility of DWMRs cannot be fully utilized. Rhombic input constraints are considered first time in Chen et al. [7], it proposed a geometric analysis method to design time-varying feedback parameters.

Rectangular and diamond constraints.
2. PROBLEM STATEMENT
2.1. Rhombic Input Constraints
As shown in Figure 2, vl and vr respectively represent the velocity of robot’s driving wheels, and their maximum velocity is m, that is vl ≤ m and vr ≤ m. Usually v and ω of DWMRs are used as control inputs, and their relationship with the velocity of the driving wheel is
Thus v and ω are constrained by
The above is collated into one expression:
Formula (3) can be sorted into one expression:
Formula (4) can be expressed as the solid black rhombus in Figure 1. So far, the independent rhombic area of v and ω is obtained.

Trajectory tracking of DWMRs.
2.2. Tracking Control Based on Rhombic Input Constraints
The kinematics and dynamics equations of two-wheel differential mobile robots is
(x, y) is the center point coordinates of DWMRs and θ is used to indicate its azimuth angle (see Figure 2).
Assumption 1.
The input constraint of DWMRs is Equation (4), and its reference trajectory satisfies:
Among them, (xr, yr, θr, vr, ωr) is the target values of (x, y, θ, v, ω), where ɛ is a constant satisfies 0 < ɛ < m/l.
Remark 1.
We ensure the traceability of the trajectory by introducing a constant ɛ in formula (7).
Figure 2 shows that system errors of DWMRs are defined as:
The tracking errors system can be obtained by deriving the two sides of the above formula (8)
Now our task is how to design the controller with satisfying the input constraints to make errors tend to zero.
3. CONTROLLER DESIGN BASED ON RHOMBIC INPUT CONSTRAINTS
To design the controller, we need to use the following two lemmas:
Lemma 1 [7].
f:[0,∞) → R is first-order continuous differentiable and
Lemma 2 [7].
There is a scalar function ρ(x), x ∈ [0, ∞], which satisfies the following properties:
- (1)
ρ(x) is a continuous and non-decreasing function;
- (2)
ρ(0) = 0, and 0 < ρ(x) ≤ 1 for x ∈ [0, ∞];
- (3)
Define Ψ(x) as
Then, for ∀σ ∈ (0, ∞), there always exist α and β, such that α < Ψ(x) ≤ β holds for x ∈ [0, σ], where both α and β are positive constants.
ρ(x) = tanh(x) is a function that satisfies the above conditions.
In this paper, we refer to the controller designed in Blažič [8] as follows:
Lemma 3 [7].
For controller (11), if following conditions are met:
- (1)
- (2)
ky is differentiable and
where
To use the vector method to design controller (11), we first need to define the controller v and ω as a vector
It is necessary to design each vector in turn, so that controller can finally meet the rhombic input constraints.
From formula (14) we know that

Vector method design controller.
Since the requirement for ky is
Let ky be
According to Equations (15) and (16), we can get
If kx > 0 and kθ > 0, then according to formula (17) and (18),
In this way, the vector
We can verify that
Similarly, we can get the coordinates of F as:
Further we can get the expressions of
To design kx and kθ, let
Then, we get from (12), (24), (26), that
By formulas (15), (16), (20) and Lemma 2 we can easily get
At this point, the kx, ky and kθ meet the two conditions in Lemma 3, so the system error will converge to zero. And because of our vector method design the parameters ensure that the control variables v and ω meet the rhombic input constraints too.
4. SIMULATION RESULTS
In this section, we verify the performance of the controller through simulation and compare it with the controller in Chen et al. [7]. Before the simulation starts, some parameters are set as follows:
The maximum velocity of the drive wheels is set to m = 0.4 m/s, the wheel spacing is set to l = 0.16 m, for setting some parameters of the controller, we choose ρ(x) = tanh(x), ɛ = 0.1, λ = 0.99, μ = 0.01.
Figure 4 shows a robot gradually tracks on the reference trajectory, where the blue line represents the expected trajectory, and the red line represents the actual trajectory. Figure 5 shows the tracking errors xe, ye, θe are each gradually converge to zero, also we can guarantee the control variables v and ω satisfy the rhombic input constraints through Figure 6, and sometimes v can basically reach the bounds of rhombic input constraints. Figure 7a is the tracking errors diagram under the controller in Chen et al. [7], Figure 7b is the tracking errors diagram under our controller, it can be seen that our controller can make the errors converge faster, and the oscillation is smaller.
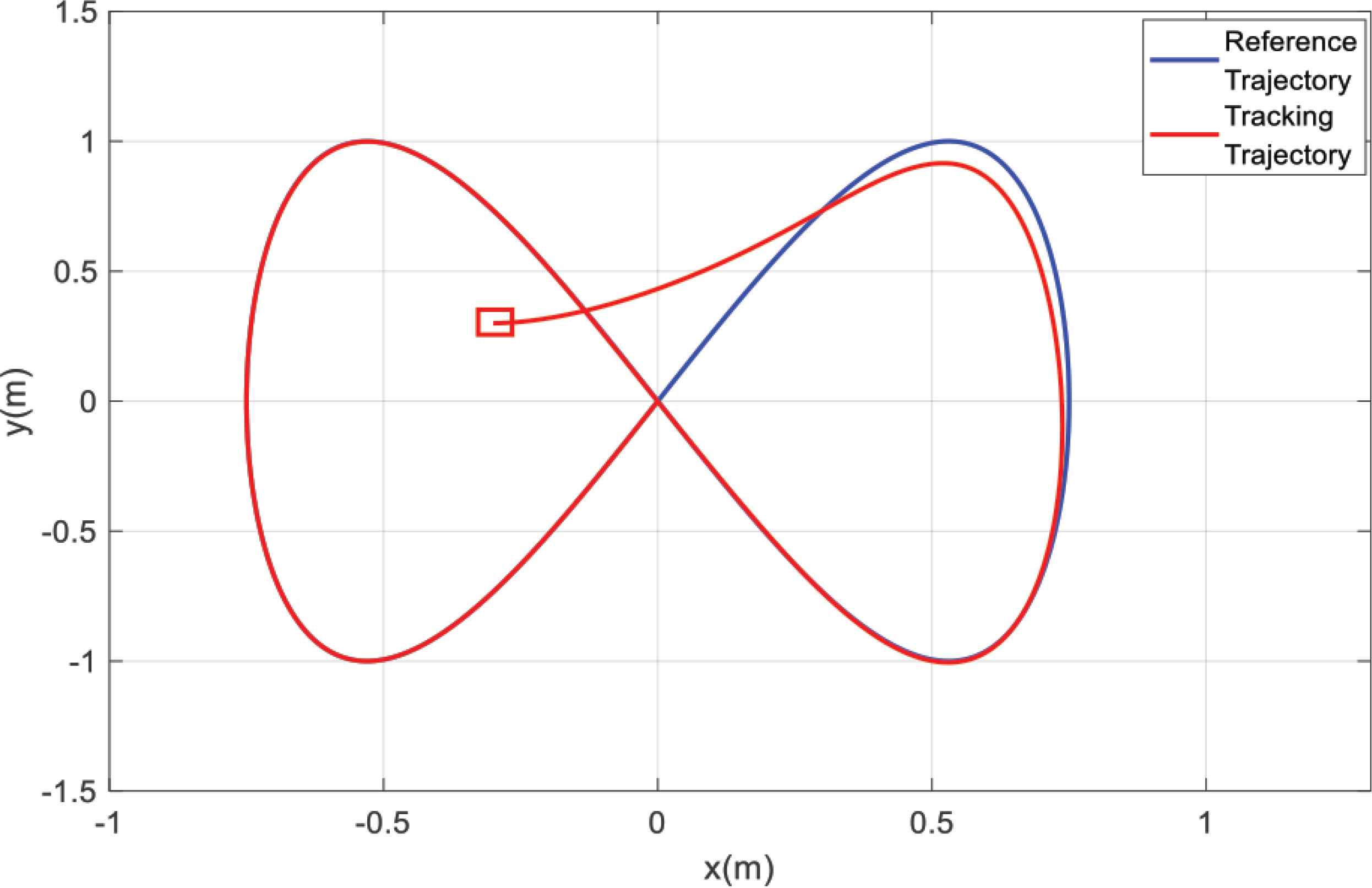
Tracking reference trajectory.

Tracking errors.

Input and constraints.
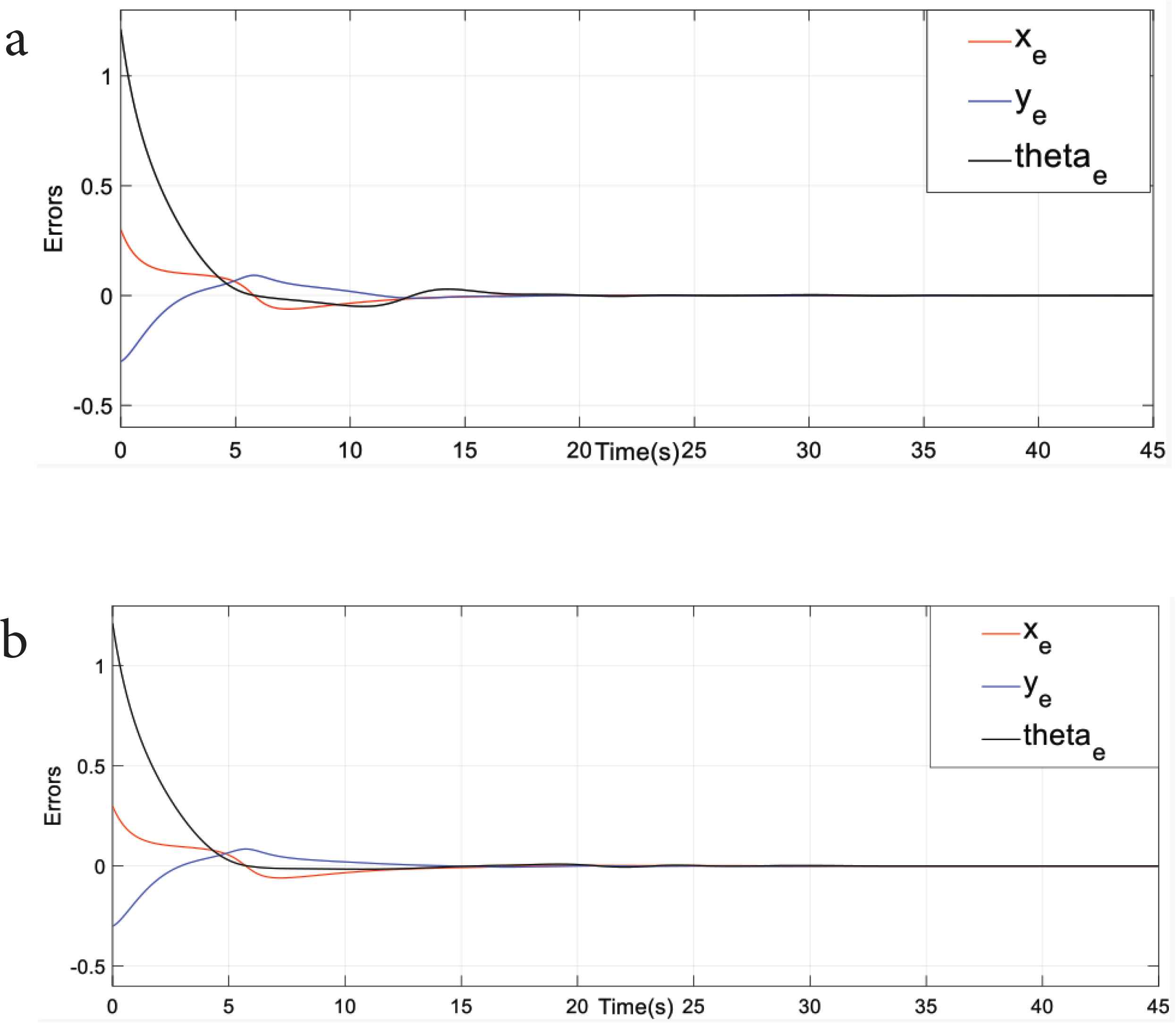
Controller errors comparison.
5. CONCLUSION
The tracking control problem of DWMRs with rhombic input constraints is solved in this paper. Compared with existing methods, we have improved the design of controller parameters and achieved better performance. Also our method can better exert the robots’ mobility and makes the tracking errors converge faster. The controller simultaneously solves the tracking problem and stability problem, its effectiveness can be confirmed by simulation results. Future work will focus on the controller design with uncertainty based on a more complex application environment.
CONFLICTS OF INTEREST
The authors declare they have no conflicts of interest.
ACKNOWLEDGMENTS
This work was supported by the NSFC (62133001, 61520106010) and the National Basic Research Program of China (973 Program: 2012CB 821200, 2012CB821201).
AUTHORS INTRODUCTION
Mr. Kai Gong
 He received the B.S. degree in measurement & control technology and instrument from Harbin Engineering University, Harbin, China, in 2016. He is currently pursuing the PhD degree with the Seventh Research Division and the Center for Information and Control, School of Automation Science and Electrical Engineering, Beihang University. His research interests include robotics and motion control.
He received the B.S. degree in measurement & control technology and instrument from Harbin Engineering University, Harbin, China, in 2016. He is currently pursuing the PhD degree with the Seventh Research Division and the Center for Information and Control, School of Automation Science and Electrical Engineering, Beihang University. His research interests include robotics and motion control.
Prof. Yingmin Jia
 He received the B.S. degree in control theory from Shandong University, China, in 1982, and the M.S. and PhD degrees both in control theory and applications from Beihang University, China, in 1990 and 1993, respectively. Then, he joined the Seventh Research Division at Beihang University where he is currently Professor of automatic control. His research interests include robust control, intelligent control and their applications in robot systems.
He received the B.S. degree in control theory from Shandong University, China, in 1982, and the M.S. and PhD degrees both in control theory and applications from Beihang University, China, in 1990 and 1993, respectively. Then, he joined the Seventh Research Division at Beihang University where he is currently Professor of automatic control. His research interests include robust control, intelligent control and their applications in robot systems.
Mr. Yuxin Jia
 He received the B.S. degree in Automation from Chongqing University, Chongqing, China, in 2017. He is currently pursuing the PhD degree with the Seventh Research Division and the Center for Information and Control, School of Automation Science and Electrical Engineering, Beihang University. His research interests include gravity compensation control and intelligent control of mobile robots.
He received the B.S. degree in Automation from Chongqing University, Chongqing, China, in 2017. He is currently pursuing the PhD degree with the Seventh Research Division and the Center for Information and Control, School of Automation Science and Electrical Engineering, Beihang University. His research interests include gravity compensation control and intelligent control of mobile robots.
REFERENCES
Cite this article
TY - JOUR AU - Kai Gong AU - Yingmin Jia AU - Yuxin Jia PY - 2021 DA - 2021/12/29 TI - Tracking Control of Mobile Robots based on Rhombic Input Constraints JO - Journal of Robotics, Networking and Artificial Life SP - 284 EP - 288 VL - 8 IS - 4 SN - 2352-6386 UR - https://doi.org/10.2991/jrnal.k.211108.011 DO - 10.2991/jrnal.k.211108.011 ID - Gong2021 ER -