
A Metaheuristic Approach for Parameter Fitting in Digital Spiking Silicon Neuron Model
- DOI
- 10.2991/jrnal.2018.5.1.8How to use a DOI?
- Keywords
- Spiking neuron model; Low-threshold spiking; Intrinsically bursting; Differential evolution; FPGA
- Abstract
DSSN model is a qualitative neuronal model designed for efficient implementation in digital arithmetic circuit. In our previous studies, we developed automatic parameter fitting method using the differential evolution algorithm for regular and fast spiking neuron classes. In this work, we extended the method to cover low-threshold spiking and intrinsically bursting. We optimized parameters of the DSSN model in order to reproduce the reference ionic-conductance model.
- Copyright
- Copyright © 2018, the Authors. Published by Atlantis Press.
- Open Access
- This is an open access article under the CC BY-NC license (http://creativecommons.org/licences/by-nc/4.0/).
1. Introduction
The silicon neuronal network is composed of analog and (or) digital circuits that solve the differential equations of neuronal and synaptic models. Different kinds of neuronal models have been used in silicon neuronal networks because of the trade-off between reproducibility of neuronal activities and computational efficiency. For example, Merolla et al.1 constructed a digital silicon neuronal network comprising 1 million spiking neurons and 256 million synapses. They adopted Leaky integrate-and-fire (LIF) model that is one of the most commonly used and simple neuron models. Thomas et al.2 implemented 1024-spiking neurons of Izhikevich (IZH) model3 on a field-programmable gate array (FPGA). Those LIF, expanded LIF, and IZH models are categorized as integrate-and-fire (I&F) based model which approximates a spiking process by the resetting of the state variables. The I&F-based models can be implemented resource-efficiently, but are capable of reduced reproducibility of complex neuronal activities. For example, these models assume that the amplitude of spikes is fixed, whereas the spike intensity is nonuniform in the nervous system.4
We have been studying qualitative neuronal models for digital as well as analog circuit implementation that satisfy both the reproducibility of neuronal activities and low computational cost.5, 6, 7, 8 The core idea of our qualitative-modeling-based approach is to reproduce the core mathematical structures that a wide variety of neuronal activities. In our previous studies,9, 10 we extended the DSSN models7 to support various neuronal classes; regular spiking (RS), fast spiking (FS), intrinsically bursting (IB), low-threshold spiking (LTS), elliptic bursting (EB), and parabolic bursting (PB). We also studied an automatic parameter fitting method using the differential evolution (DE) algorithm11 for the RS and FS classes.12
In this work, we developed the method for the low-threshold spiking and intrinsically bursting classes. Parameters were optimized to reproduce waveforms of the ionic-conductance models in Ref. 13 and reduce the circuit resource requirements for implementation.
The remainder of this paper is organized as follows. Section 2 introduces our neuron model, the DE algorithm, and details of our parameter optimization procedure. The result is shown in Section 3. Section 4 summarizes this work and suggests ideas for the future.
2. Method
2.1. Digital Spiking Silicon Neuron model
The 4-variable DSSN model is a qualitative neuron model that can simulate various neuronal classes (RS, FS, IB, LTS, EB, and PB) by Euler’s method with fixed point operation. Its equations are given by
2.2. Differential evolution algorithm
The DE algorithm11 is a popular heuristic method to solve optimization problems using a real number function. It is one of the population-based optimization algorithms in which a number of parameter sets are converged to quasi-optimal solutions with which the DSSN model reproduces the target waveform. The initial random parameter sets have to be selected carefully so that the behavior of the DSSN model does not diverge. Detailed explanation is written in the previous study.12
2.3. Parameter optimization procedure
The LTS class neurons are found in the thalamus. It has the spike-frequency adaptation as with the RS class, and has the rebound bursting; neurons in the LTS class generate a burst firing just after the termination of a sufficiently strong and long hyperpolarizing stimulus. The IB class is a well-known bursting neuron class in the cortex. Neurons in the IB class generate a burst firing immediately at the onset of a sufficiently strong stimulus, then continue spiking until its termination.
The DSSN model has 28 parameters, and exploring their spanning space is not realistic for the computers with average power. To avoid this problem, we divided the state variables of the DSSN model into two groups based on their time scale, and tuned each group in sequence. In our previous study,12 the RS and FS classes were characterized as the degree of spike-frequency adaptation, and we just optimized parameters of fast state variables in order to reproduce the saddle-node on invariant circle bifurcation. However, LTS and IB classes have more complex structure in their fasts subsystem. For the LTS class, we firstly explored the parameter group responsible for the dynamics of the fast state variables v and n so that the fast subsystem of our model is consistent with that of the ionic conductance model of the LTS class. Then, the parameters related to the slow state variable q were determined so that the dynamical behavior of the whole ionic conductance model of the LTS class is reproduced. For the IB class, we firstly fitted the parameters responsible for the dynamics of the state variables v, n, and q so that the dynamical behavior of the corresponding subsystem in the ionic conductance model of the IB class is reproduced. Then, the parameters related to the remaining variable u were determined so that the dynamical behavior of the whole ionic conductance model of the IB class is reproduced.
In the DSSN model’s circuit implementation, multiplication between a coefficient and a state variable was realized by shifters and adders, and we needed a larger number of adders and shifters as the number of digits with value 1 in the fixed point representation of the coefficient increases. Parameters were optimized for not only reproducing waveforms of the ionic-conductance model but also reducing the circuit size. We defined the cost functions f1 and f2 as follows,
In the LTS class, parameters related to state variables v and n were firstly determined to minimize the cost function f1. Then the slow state variables are fixed in the ionic conductance model, which is used as the target waveforms in the fw1. Secondly, the remaining parameters related to the slow variable q were determined to minimize the cost function f2. The original ionic conductance model is used in the fw2. In the IB class, parameters related to state variables v, n, and q were firstly determined to minimize the cost function f1. Secondly, the remaining parameters related to the slowest variable u were determined to minimize the cost function f2.
3. Result
We found two parameter sets with which the DSSN model reproduces the activities of the ionic-conductance models for LTS and IB classes (Fig. 1). We evaluated the similarity of the spiking patterns between the ionic-conductance model and the DSSN model by calculating some statistics while changing the stimulus intensity (Fig. 3). For the LTS class, we used CV and LV14 and these are explained in our previous study.12 Our fitted model’s CV – LV characteristics are not completely the same as that of the reference model, but share the trend that CV and LV decreases as the stimulus intensity increases. For the IB class, we measured the number of spikes in the bursting duration and average firing rate after the bursting. With both models, the number of spikes in the bursting duration increases linearly as the average firing rate increases, although the exact value does not coincide completely. The similarity of these characteristics will be further estimated based on the requirements specified by the circuits’ applications.
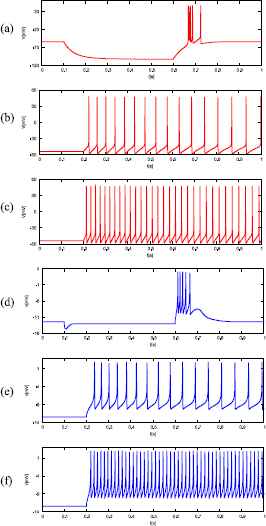
Waveforms of the ionic-conductance model (red) and the DSSN model (blue) of the LTS class in response to an inhibitory (top) and weak excitatory (middle) and strong excitatory (bottom) step stimulus input.
The results in Figs. 1, 2, and 3 were obtained by numerical integration with fixed-point operation and the Euler’s method (dt = 2−13 s) in C language. The same results are expected to be observed in the following FPGA implementation, because this condition is the same as our VHDL codes. We compiled the DSSN models for Xilinx XC7VX690T using Xilinx Vivado Design Suite. Device utilization is listed in Table 1. In the column labeled LTS (hand-fitted) and IB (hand-fitted), the resource usage for LTS and IB settings in Ref. 9 is shown. The requirement for LUTs was reduced without any loss of the reproducibility of the neuronal activities.

Waveforms of the ionic-conductance model (red) and the DSSN model (blue) of the IB class in response to a weak (top) and middle (middle) and strong (bottom) excitatory step stimulus input.

Statistical properties of the ionic-conductance model (red) and the DSSN model (blue). In the LTS mode (left), the x–axis and y-axis are CV and LV. In the IB mode (right), x-axis corresponds to the number of spikes in the bursting and y-axis corresponds firing rate after the bursting.
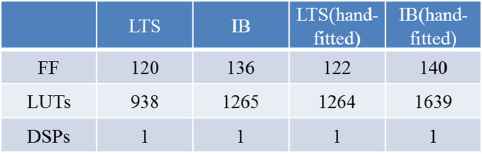
Device Utilization.
4. Conclusion
In this work, we extended the parameter optimization method for the DSSN model in the LTS and IB class modes. These classes have complex mathematical structures of the fast subsystem, thus we carefully designed our fitting procedure in order to reproduce important structures in these classes. We could find parameter sets with which the DSSN model reproduces the characteristics activities of LTS and IB classes using average-power PC (a Xeon E5-2667 CPU with a NVIDIA P100 GPU). Cost functions fbx were introduced to reduce the necessary circuit size. We confirmed that the DSSN model with determined parameter set can precisely reproduce the ionic conductance model in C simulation, and the necessary circuit size was simulated by Xilinx Vivado Design Suite. In our future work, we will apply our silicon neuronal networks to the spike pattern recognition.15
Acknowledgement
This work was partially supported by JSPS SAKURA Program and JST PRESTO and CREST
References
Cite this article
TY - JOUR AU - Takuya Nanami AU - Filippo Grassia AU - Takashi Kohno PY - 2018 DA - 2018/06/30 TI - A Metaheuristic Approach for Parameter Fitting in Digital Spiking Silicon Neuron Model JO - Journal of Robotics, Networking and Artificial Life SP - 32 EP - 36 VL - 5 IS - 1 SN - 2352-6386 UR - https://doi.org/10.2991/jrnal.2018.5.1.8 DO - 10.2991/jrnal.2018.5.1.8 ID - Nanami2018 ER -