
Weighted Nonnegative Matrix Factorization for Image Inpainting and Clustering
 , Nian Zhang2, Keke Zhang1, Jiang Xiong1
, Nian Zhang2, Keke Zhang1, Jiang Xiong1- DOI
- 10.2991/ijcis.d.200527.003How to use a DOI?
- Keywords
- Recovery; Dimensionality reduction; Weighted nonnegative matrix factorization; Noise
- Abstract
Conventional nonnegative matrix factorization and its variants cannot separate the noise data space into a clean space and learn an effective low-dimensional subspace from Salt and Pepper noise or Contiguous Occlusion. This paper proposes a weighted nonnegative matrix factorization (WNMF) to improve the robustness of existing nonnegative matrix factorization. In WNMF, a weighted graph is constructed to label the uncorrupted data as 1 and the corrupted data as 0, and an effective matrix factorization model is proposed to recover the noise data and achieve clustering from the recovered data. Extensive experiments on the image datasets corrupted by Salt and Pepper noise or Contiguous Occlusion are presented to demonstrate the effectiveness and robustness of the proposed method in image inpainting and clustering.
- Copyright
- © 2020 The Authors. Published by Atlantis Press SARL.
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. INTRODUCTION
Non-negative matrix factorization (NMF) [1] is a popular dimensionality reduction method, which decomposes an original data matrix into two low-dimensional nonnegative matrices. Among the decomposed matrices, one is coefficient matrix to store a low-dimensional representation, and the other is a basis matrix which can be regarded as parts-based representations of the original data. Owing to the excellent presentation approach, NMF has been widely applied to clustering [2,3], recommender system [4], community detection [5], semi-supervised learning [6], and so on.
Recently, most of studies were seeking an effective NMF to handle outliers and noise in the dataset [7–18]. Hamza and Brady [7] was the first to replace the Frobenius norm with the hypersurface cost function (HCNMF). The main contribution of HCNMF is that it can achieve a more robust representation than NMF. Kong et al. [8] presented the
The above robust NMF variants have been utilized in signal processing [19], image processing [20], clustering [21] and image classification [22]. However, they have the following defects: (1) Most of methods can neither handle Salt and Pepper noise nor Contiguous Occlusion. In this case, the learned subspace is not suitable for clustering or classification. (2) Robust NMF methods using different loss functions supposed that the smaller factorization error and the better representation are achieved by a suitable loss function. To our knowledge, the proposed algorithms optimizing these loss functions are more complicated and take much time to complete matrix factorization.
Motivated by recent work, we propose an effective matrix decomposition framework, called weighted non-negative matrix factorization (WNMF) to overcome the abovementioned problems, which constructs the weighted graph to build the relation between the original data and outliers. Thus, WNMF can recover the corrupted data and achieve robust clustering. Because the objective function of WNMF is nonconvex, we propose an iterative algorithm to solve it and prove the convergence of the proposed optimization scheme. The main contributions of this paper can be summarized as follows:
We propose a WNMF framework to handle outliers and noise, and we explain why the proposed model is effective and robust.
Our proposed model can achieve data recovery and clustering from the original data corrupted by Salt and Pepper noise or Contiguous Occlusion.
2. RELATED WORKS
Suppose that the input data matrix
In [12], Zhang et al. proposed a robust model (RNMF)to handle outliers and noise as follows:
Guan et al. [9] proposed Manhattan distance (MahNMF) to be the criterion of loss function. MahNMF can reduce the approximation error, which can be summarized into the following optimization problem:
Guan et al. [13] proposed the three-sigma-rule to detect outliers and a Truncated Cauchy loss (CauchyNMF) to remove outliers. CauchyNMF can be summarized as follows:
3. WEIGHTED NONNEGATIVE MATRIX FACTORIZATION
3.1. Model Formulation
Existing robust models have the following properties: (1) They can easily handle Gaussian noise, however, they fail to remove Salt and Pepper noise and Contiguous Occlusion. (2) The proposed algorithms of some robust models (e.g., RMahNMF and CauchyNMF) are too complicated to learn a robust low-dimensional subspace from the high-dimensional data. (3) Only RNMF can achieve data recovery and representation simultaneously. In the following, we investigate the relation between the noise distribution and the corrupted data, and propose a robust weighted NMF to achieve a clean data space and a robust low-dimensional representation from the corrupted data.
Suppose that
By minimizing (8), (2) and (3), we expect that if the recovered data matrix is obtained from the corrupted image matrix
Given a corrupted data matrix
3.2. Robustness Analysis
In this subsection, we compare the robustness of RMahNMF with existing robust NMF models (e.g., NMF [1], MahNMF [9], RNMF [12] and CauchyNMF [13]) by utilizing a simple-weighted procedure. A robust NMF algorithm should produce a small weight to an entry of the training sample with large noise. We present some assumptions as follows:
Thus, we should find the
| NMF Methods | Objective Function |
Derivative |
|---|---|---|
| NMF | ||
| MahNMF | ||
| RNMF | ||
| CauchyNMF | ||
| WNMF |
Note: WNMF, weighted nonnegative matrix factorization; NMF, nonnegative matrix factorization.
Robustness comparison results between WNMF and other NMF models.
4. OPTIMIZATION ALGORITHM
Since problem (9) is nonconvex in optimizing
We first discuss transform the objective function of (9) as follows:
The gradient method and KKT conditions are utilized to solve (15), (16) and (17). Based on the gradient method, the solution of (15) can be obtained
Based on the KKT conditions
Equations (19) and (20) can lead to the solution of (16) and (17) as follows:
According to above analysis, we summarize the update rules (18), (21) and (22) in Algorithm 1.
The convergence condition of Algorithm 1 can be summarized as follows:
5. CONVERGENCE PROOFS
Definition 1.
[23] Suppose that
Lemma 1.
[23] Let
Algorithm 1 Weighted Nonnegative Matrix Factorization
Require:
Ensure:
1: Initializing
2: while true do
3:
4:
5:
6: Check convergence
7:
8: end while
9:
Lemma 2.
[23] The following function
Proof.
It is obvious that
According to Definition 1,
We can obtain
Therefore, (28) holds and
Proof.
Suppose that the k-th iteration
Similarly,
Theorem 2.
The objective function in (9) is nonincreasing with the abovementioned update rules (18), (21) and (22).
Proof.
The update rule in (18) is obtained by the gradient method. Obviously,
Therefore,
6. EXPERIMENTAL RESULTS
We explore the recovery and the clustering performance of WNMF on the ORL and YALE face dataset and compare it with four NMF models (i.e., NMF [1], RNMF [10], MahNMF [9] and CauchyNMF [13]). In the experiments, Salt and Pepper noise and Contiguous Occlusion are proposed to evaluate the effectiveness and robustness of the abovementioned NMF models.
Salt and Pepper noise randomly generates a portion of white and black pixels. To test the recovery effect of WNMF, we propose four level percentages of corrupted pixels (i.e.,
The ORL dataset includes 400 face images of different 40 individuals. There are 10 images of each person with different facial expressions, facial details (without-glasses or with-glasses) and lighting. Each image is a
To demonstrate the recovery effects and the clustering performances of all NMF models, we propose two metrics as follows:
Peak Signal-to-Noise Ratio (PSNR) is proposed to evaluate the recovery effect, which can be defined by
whereAccuracy (AC) and Normalized Mutual Information (NMI) [24] are proposed to test the clustering effect. Due to the nonconvexity of all NMF models, 30 random initial
6.1. Parameter Selection
Our WNMF model has one essential parameter
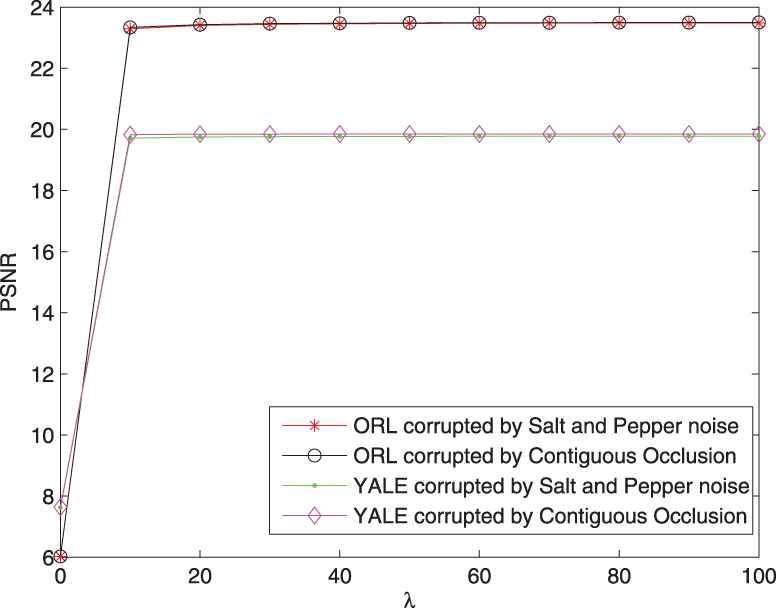
The peak signal-to-noise ratios (PSNRs) of weighted nonnegative matrix factorization (WNMF) vs. parameter varies from 10 to 100.
6.2. Salt and Pepper Noise
6.2.1. Visualization of recovered faces
Recovered face images of the ORL and YALE datasets corrupted by Salt and Pepper noise are shown in Figure 2. The PSNRs between the face images contaminated by Salt and Pepper noise and the recovered face images are presented in Table 2. From the comparisons, we observe that
Traditional NMF achieves the smallest PSNRs and the worse recovery performances than other NMF models. Therefore, NMF is more sensitive to Salt and Pepper noise. For the small corrupted percentage (i.e.,
According to comparisons of PSNRs, WNMF remains the highest PSNRs. CauthyNMF and RNMF perform satisfactorily in the beginning, however, they slow down as the corrupted percentage varies. In summary, WNMF can achieve the smallest factorization error than other NMF models.
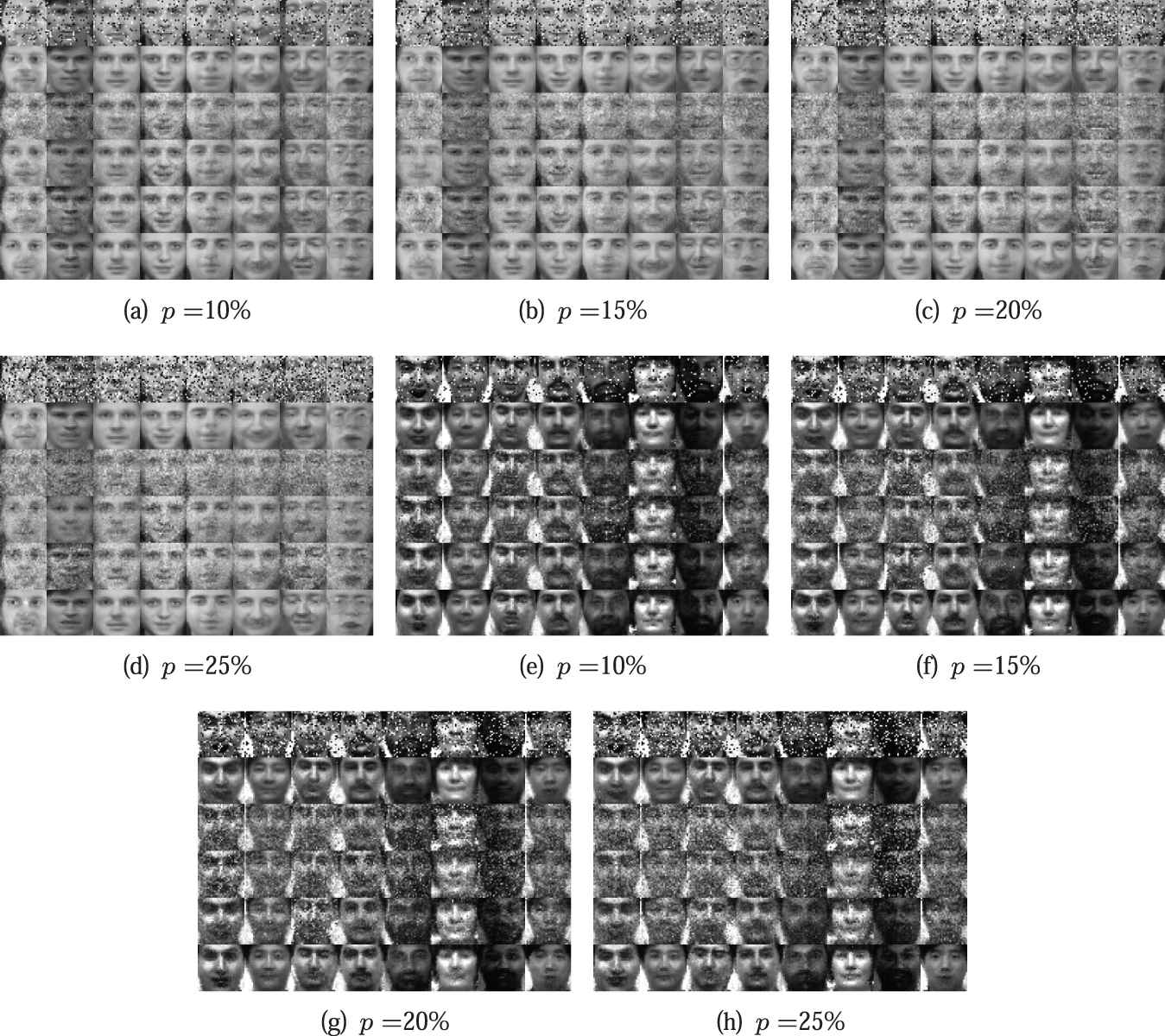
Recovered images from the ORL and YALE datasets corrupted by Salt and Pepper noise. For (a)–(h), the first row is sample images under the corrupted percentage p, and the last five rows are recovered images by weighted nonnegative matrix factorization (WNMF), NMF, MahNMF, RNMF and CauchyNMF.
| ORL |
YALE |
|||||||
|---|---|---|---|---|---|---|---|---|
| 10 | 15 | 20 | 25 | 10 | 15 | 20 | 25 | |
| WNMF | 25.28 | 25.17 | 25.05 | 24.89 | 20.28 | 20.38 | 20.17 | 19.92 |
| NMF | 20.83 | 19.44 | 18.38 | 17.55 | 17.82 | 16.41 | 15.31 | 14.50 |
| MahNMF | 22.82 | 21.68 | 20.79 | 19.98 | 17.73 | 16.34 | 15.31 | 14.38 |
| RNMF | 23.47 | 22.32 | 21.16 | 20.04 | 20.26 | 19.19 | 18.17 | 16.96 |
| CauchyNMF | 23.76 | 23.8 | 23.93 | 24.09 | 18.67 | 18.65 | 18.62 | 18.30 |
Note: WNMF, weighted nonnegative matrix factorization; NMF, nonnegative matrix factorization; PSNR, peak signal-to-noise ratio.
PSNRs on the ORL and YALE datasets contaminated by Salt and Pepper with different corrupted percentages from 10% to 25%.
6.2.2. Clustering
Figure 3 shows the clustering performances on the ORL and YALE datasets contaminated by Salt and Pepper noise. From the comparisons, the interesting observations are
WNMF and CauthyNMF have the better clustering results, which indicates they can learn a more robust subspace for clustering.
CauthyNMF performs satisfactorily in the beginning, however, it achieves poor performances as the corrupted percentage increases.
WNMF achieves relatively stable clustering results on the Salt and Pepper noise, that is to say, WNMF can hardly be affected by the outliers. When
All the clustering results indicate that WNMF can learn a better subspace on the ORL dataset contaminated by Salt and Pepper noise.
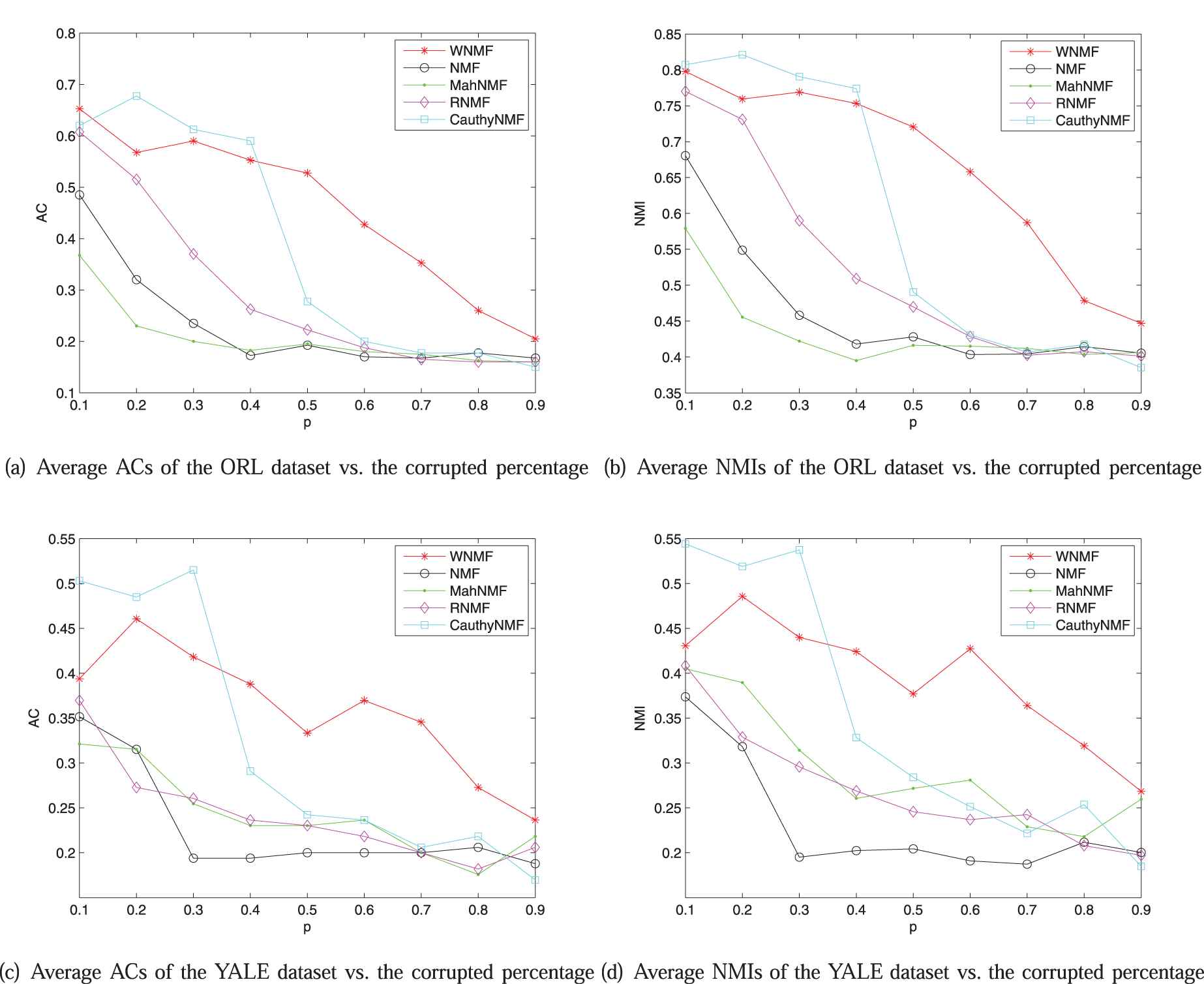
Evaluation on the ORL and YALE databases contaminated by Salt and Pepper noise.
6.3. Contiguous Occlusion
6.3.1. Visualization of recovered faces
Figure 4 and Table 3 present the recovery faces and the PSNRS of the ORL and YALE datasets contaminated by Contiguous Occlusion. According to experimental results, we observe that
WNMF can achieve face recovery completely as the block size varies. CauchyNMF can recover some corrupted faces in the smaller block size (i.e.,
As the block size increases, WNMF remains the highest PSNRs than other algorithms. CauchyNMF can only achieves satisfactory PSNRs when the block size is small enough.
WNMF and CauchyNMF can handle Contiguous Occlusion. WNMF can completely handle Contiguous Occlusion, but CauchyNMF can remove Contiguous Occlusion when the corrupted region is very small.
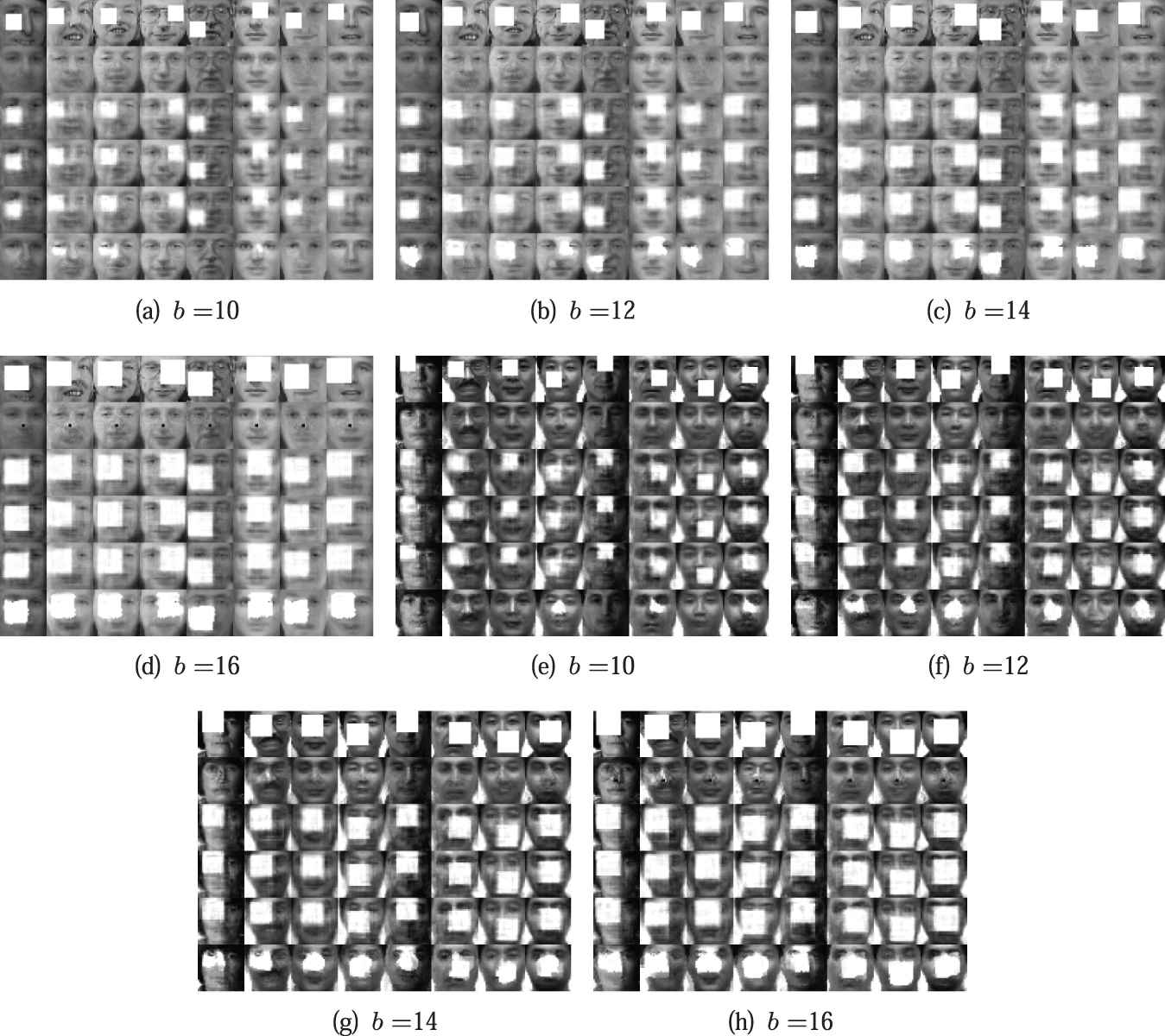
Recovered images from the ORL and YALE datasets corrupted by Contiguous Occlusion. For (a)–(h), the first row is sample images under the corrupted block size b, and the last five rows are recovered images by weighted nonnegative matrix factorization (WNMF), NMF, MahNMF, RNMF and CauchyNMF.
| ORL |
YALE |
|||||||
|---|---|---|---|---|---|---|---|---|
| 10 | 12 | 14 | 16 | 10 | 12 | 14 | 16 | |
| WNMF | 23.83 | 23.54 | 23.15 | 21.79 | 20.09 | 19.68 | 19.18 | 18.48 |
| NMF | 15.5 | 14.19 | 13.03 | 11.97 | 12.79 | 11.44 | 10.26 | 9.195 |
| MahNMF | 15.55 | 14.23 | 13.03 | 11.95 | 12.78 | 11.43 | 10.23 | 9.203 |
| RNMF | 15.53 | 14.2 | 13.03 | 11.97 | 12.8 | 11.45 | 10.27 | 9.192 |
| CauchyNMF | 20.93 | 15.29 | 13.42 | 12.09 | 16.84 | 13.54 | 10.88 | 9.489 |
Note: WNMF, weighted nonnegative matrix factorization; NMF, nonnegative matrix factorization; PSNR, peak signal-to-noise ratio.
PSNRs on the ORL and YALE datasets contaminated by Contiguous Occlusion with different block sizes from 10 to 16.
6.3.2. Clustering
According to Figure 5, we can conclude that
WNMF is more robust to remove a large number of outliers of Contiguous Occlusion, which denotes that WNMF can learn a more robust representation from the ORL and YALE datasets corrupted by Contiguous Occlusion.
NMF, MahNMF and RNMF cannot handle Contiguous Occlusion, which indicates that they cannot achieve a robust subspace for clustering.
CauthyNMF achieve excellent clustering results in the beginning, however, they perform unstable as the ORL and YALE datasets are contaminated by serious corruptions.
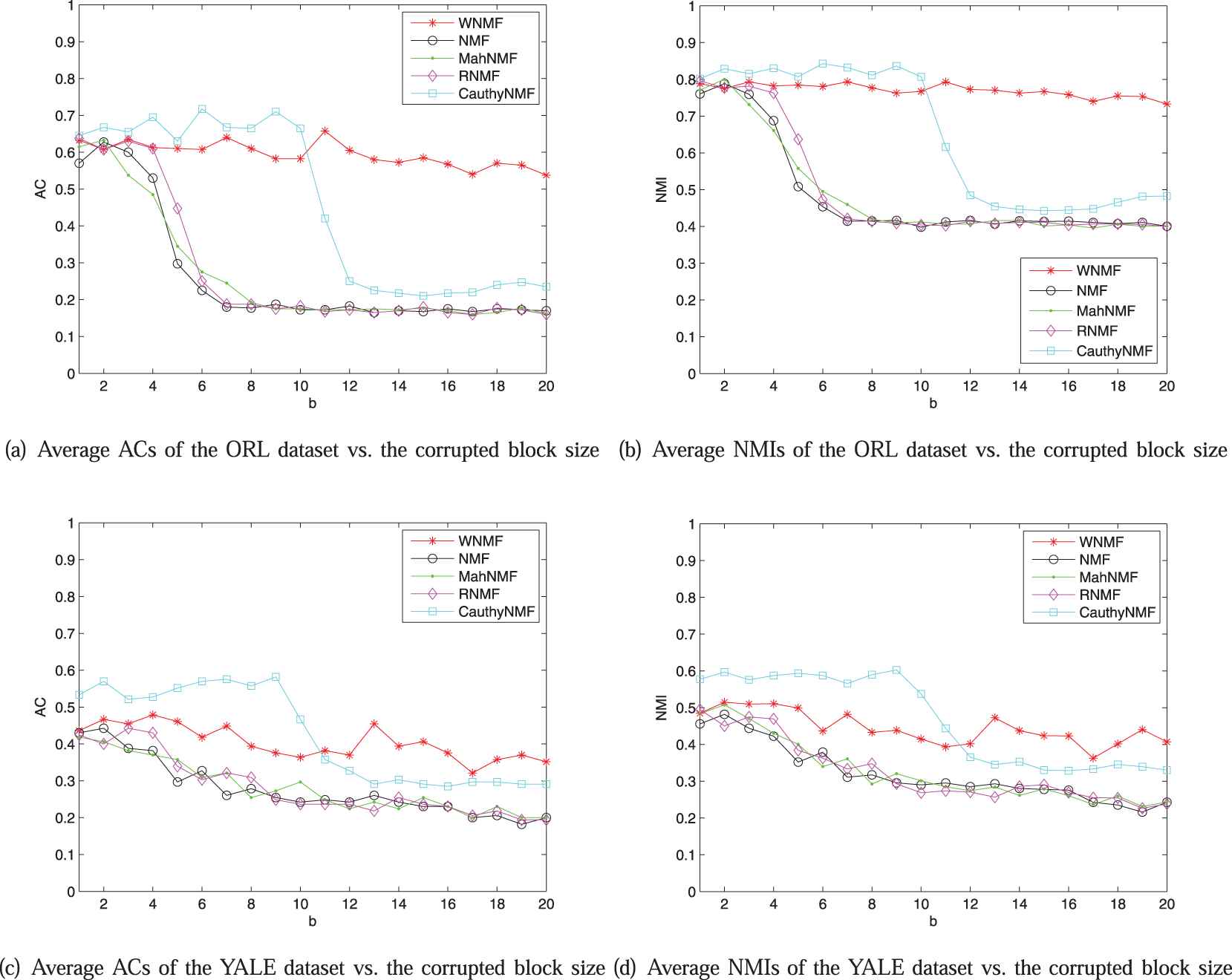
Evaluation on the ORL and YALE databases contaminated by Contiguous Occlusion.
6.4. Convergence Study
The update rules (18), (21) and (22) for optimizing WNMF are iterative. These rules are proved to be convergent. In this subsection, we investigate whether these rules can be convergent. Figure 6 presents the convergence curves of WNMF on the ORL and YALE dataset corrupted by Salt and Peeper noise and Contiguous Occlusion. For each figure, the x-axis is the iteration number, and the y-axis denotes the objective value defined in (23). Suppose that

Convergence curves on ORL and YALE corrupted by Salt and Peeper noise and Contiguous Occlusion.
7. CONCLUSION
This paper proposed an effective weighted NMF model to handle outliers and noise. The advantages of the proposed framework are as follows: (1) WNMF is more effective and robust to handle Salt and Pepper noise and Contiguous Occlusion. (2) WNMF can achieve a cleaner data space and a smaller factorization error when the ORL and YALE datasets are contaminated by Salt and Pepper noise and Contiguous Occlusion. (3) WNMF can learn a more robust low-dimensional presentation for clustering when the ORL and YALE datasets are contaminated with heavy corruptions.
CONFLICT OF INTEREST
We would like to submit the enclosed manuscript entitled “Weighted Nonnegative Matrix Factorization for Image Inpainting and Clustering ” which we wish to be considered for publication in “International Journal of Computational Intelligence Systems”. No conflict of interest exits in the submission of this manuscript, and this manuscript is approved by all authors for publication. I would like to declare on behalf of my co-authors that the work described was original research that has not been published previously, and not under consideration for publication elsewhere, in whole or in part. All the authors listed have approved the manuscript that is enclosed.
AUTHORS' CONTRIBUTIONS
KeKe Zhang and Nian Zhang proposed a weighted non-negative matrix factorization framework and designed the related algorithm. Jiang Xiong tested the algorithm and demonstrated the robustness and effectiveness of the proposed algorithm. Xiangguang Dai wrote and revised the manuscript.
ACKNOWLEDGMENTS
This work is supported by Foundation of Chongqing Municipal Key Laboratory of Institutions of Higher Education ([2017]3), Foundation of Chongqing Development and Reform Commission (2017[1007]), Scientific and Technological Research Program of Chongqing Municipal Education Commission (Grant Nos. KJQN201901218 and KJ1710248), Natural Science Foundation of Chongqing (Grant No. cstc2019jcyj-bshX0101), Foundation of Chongqing Three Gorges University and National Science Foundation (NSF) grant #1505509 and DoD grant #W911NF1810475.
REFERENCES
Cite this article
TY - JOUR AU - Xiangguang Dai AU - Nian Zhang AU - Keke Zhang AU - Jiang Xiong PY - 2020 DA - 2020/06/17 TI - Weighted Nonnegative Matrix Factorization for Image Inpainting and Clustering JO - International Journal of Computational Intelligence Systems SP - 734 EP - 743 VL - 13 IS - 1 SN - 1875-6883 UR - https://doi.org/10.2991/ijcis.d.200527.003 DO - 10.2991/ijcis.d.200527.003 ID - Dai2020 ER -