
Behavior Selection System for Human–Robot Cooperation using Tensor SOM
- DOI
- 10.2991/jrnal.k.200528.002How to use a DOI?
- Keywords
- Strategy; self-organizing map; team behavior; Tensor SOM; multi-agent system; human–robot cooperation
- Abstract
With the progress of technology, the realization of a symbiotic society with human beings and robots sharing the same environment has become an important subject. An example of this kind of systems is soccer game. Soccer is a multi-agent game that requires strategies by taking into account each member’s position and actions. In this paper, we discuss the results of the development of a learning system that uses self-organizing map to select behaviors depending on the situation. A set of possible actions in soccer game is decided in advance and the algorithm is able to select the best option, given some specific conditions.
- Copyright
- © 2020 The Authors. Published by Atlantis Press SARL.
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (http://creativecommons.org/licenses/by-nc/4.0/).
1. INTRODUCTION
Recently, the implementation of robots in society has become a possible solution to many problems, such as ensuring the safety of a sustainable society, responding to a rapid population aging and population decrease. Moreover, robots will represent the foundation of the future industry.
To properly implement a robotized society, it is necessary to conduct and to present research outcomes in a manner that is easy to understand, avoiding differences between social expectations and the direction of research and development.
Therefore, it is essential to discuss how to achieve coexistence with robots and what a symbiotic society should look like. In such a society, humans and robots interact with each other and they are capable of mutual understanding. Not only they need to be aware of their own actions, but also of all the other agents’ actions, where agent means each of the active subject involved.
The aim of this work is to develop a suitable algorithm to create intelligent robots able to share the environments with humans. Since soccer involves strategies, cooperation, unpredictable movements and common targets, it represents a good test bed for developing such algorithm.
Tensor Self-Organizing Map (Tensor SOM) [1] is used for this scope.
2. COOPERATIVE BEHAVIOR
Cooperative behavior becomes a crucial aspect when different autonomous agents interact while performing a common task. Often a single agent is not much effective in accomplishing a task, and in the last years many researchers have been studying Multi-Agent Systems (MAS) to solve difficult problems.
The agents interact to each other and with the environment by taking real time decisions based on the data acquired from the sensors [2,3].
As a test bed of MAS, RoboCup [4], a project aimed to win the Soccer World Cup against Humans, encourages the cooperation of multi-agents using learning methods, such as reinforcement learning and neural networks. According to Sandholm and Crites [5], reinforcement learning can be used successfully for the iterated prisoner’s dilemma, if sufficient measurements data and actions are available. In addition, Arai et al. [6] compared the Q-learning and Profit Sharing methods about the Pursuit Problem in a MAS, when the environment is modelled as a grid, and showed that cooperative behaviors emerge clearly among Profit Sharing. However, these studies have not yet considered applications for robots that operate in a real environment.
3. ROBOT LEARNING
Among the learning algorithms, unsupervised learning is a promising method for MAS systems.
The advantage in unsupervised learning is that the robot is not required to have any previous information concerning the environment and prerequisite knowledge of the robot itself. However, since many tests and experiences are needed for learning, it is important for the designer to define in advance and clearly what are the important parameters and variables to consider during the game, so as to define the state space and the action space, and to reduce the cost and the time.
The design of the state space depends on what the robot is able to do in the action space. The two spaces are mutually interconnected.
To design the state space in an efficient way, Takahashi and Asada [7] proposed a method in which the state space is initially divided into two main states, and then divided recursively into many layers with an increasing number of states. Nonetheless, they found that some bias can still affect the behavior of the robot and cause some wrong action and habit.
3.1. Human–Robot Cooperation
As mentioned above, a humans–robots cooperative society is a topic of interest for many researchers and several works have been carried out.
In such a symbiotic system, it is mandatory for the robots to understand and interpret humans’ behavior and act accordingly. However, the target in research is often about the robots’ behavior only, or a behavior based on an interaction defined precisely between a specific number of humans and robots. Also, in a MAS the communication between humans and robots is usually carried out by means of some kind of interface, for example command voice or gestures. But this might not be enough, especially when the system is very complex.
Accordingly, the robot should be able to understand some situations and adapt its behavior in a predictive manner, just as humans do.
The main goal of this research is to analyze the cooperative behaviors among soccer players and apply them to robots (see Figure 1).
A human–robot symbiotic system.
A neural network based on Tensor SOM is designed to achieve this target.
The input vector elements for a neural network is chosen so as to achieve the lowest possible gap between humans and robots’ actions. To obtain this, it is important at first to understand humans’ behavior and develop robots able to understand such behaviors and imitate them.
This paper focuses on the study of robots’ behavior in a futsal game, because this represents a good test bed, with a dynamic environment, several constrains and it requires a real-time planning. These are the characteristics of a common symbiotic system in which the robots may operate in the future.
4. SOM AND TENSOR SOM
Self-organizing map [8] is an unsupervised learning technique and is known as competitive learning, similar to information processing via neural circuits. Competitive learning is an important concept in hierarchical neural networks. Each input neuron in the input layer (input space) is connected to all output layer neurons. The strength of the relation between two neurons in consecutive layers is decided by a specific weight assigned to each connection.
The input vectors “compete” with each other so as to find the best output vector. With best output, it is meant that the output vector whose elements are as similar as possible to the input vector elements.
To establish this similarity, the Euclidean distance is used. By doing this, clusters into the output map are obtained. The cooperative hierarchy deals with the output vectors. While performing the algorithm, the elements value of each vector is adjusted. If a high change of an element occurs in a vector, the vectors around it change accordingly, but in such a way that the strength of this change decreases with the distance in the map from the first vector. In particular, the amount of change of each element is decided by the Gaussian function [9].
Since each vector modifies itself depending on the surrounding vectors, this behavior is said to be cooperative. Input vectors can have high dimension but the output results are shown in a two-dimensional map.
With this structure, multi-dimensional input vectors can have reduced dimensions in the output layer, and the features are clustered, so as to have similar features in the same area of the map. Since the output results are shown in a two-dimensional form, SOM is suitable for the visualization of complex scenarios.
Furthermore, the cooperative hierarchy and the smoothing process performed by the Gaussian function allow to synthesize elements and contents that were not clearly specified in the input vectors. SOM has a high interpolation performance and it can generalize concepts starting from a limited amount of input data. Because of these characteristics, it is well suited for unsupervised learning and highly valid outputs are expected.
A limit of SOM is that input vectors with variables of different nature are difficult to normalize. Also, the relations between these inputs to produce outputs is relatively limited. An alternative approach is to use Tensor SOM. With Tensor SOM it is possible to create a higher order input variables and a wider combinations of inputs and, accordingly, output (Figure 2).
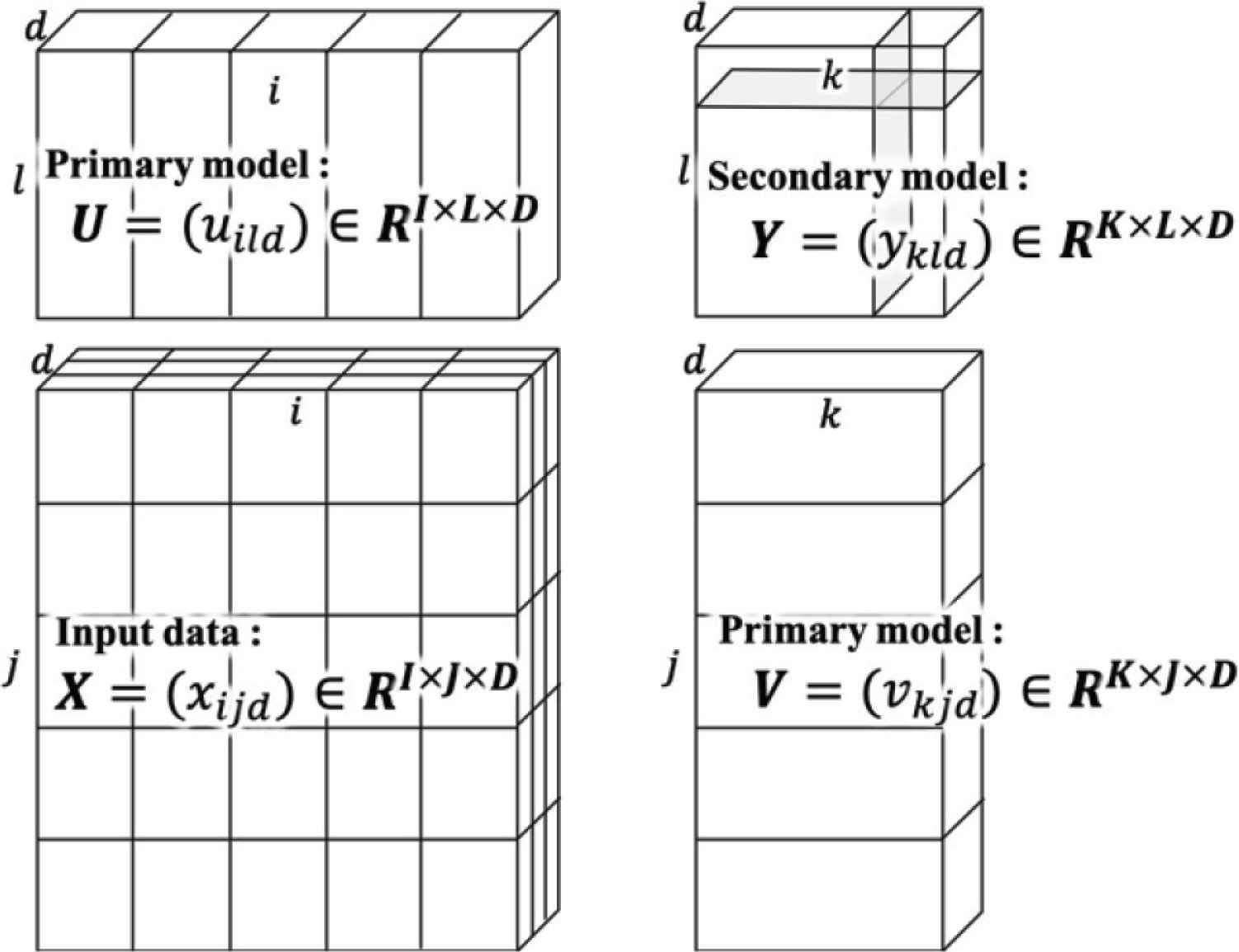
Structure of input/output tensor in Tensor SOM.
4.1. Algorithm
The Tensor SOM algorithm proceeds according to the following steps.
When an input vector is introduced in the algorithm, its Euclidean distance from all the weights vectors is evaluated. The unit (neuron) with the most similar weights is selected as the Best Matching Unit (BMU).
Figure 2 shows the structure used to update the weights and training of the neural network. This method is detailed in Iwasaki and Furukawa [1].
The input tensor X consists of all the input data. These inputs are divided into some categories, three in Figure 2, and the indices are: d, i and j.
The secondary model represents the weights output tensor. At first this is initialized with some random values.
In order to update the output tensor values, two primary models are used. In the first of the primary model (above the input tensor in Figure 2) the combinations of all the d and i conditions are evaluated. This forms a stack of l layers. Same happens for the other primary model (at the right of the input tensor in Figure 2), with the combinations of all d and j conditions, producing a stack of k layers.
The steps required for the algorithm are detailed below.
4.1.1. Choose best matching unit
The selection of the BMU in each layer,
4.1.2. Weight adjustments
Based on the distance from the BMU in the layer and on the radius s, the weight adjustments are defined as in Equations (3) and (4).
With the weights adjustments found above, the secondary and primary models values are adjusted as in Equations (5)–(9).
Update the secondary model:
Update the primary model:
5. EXPERIMENTS
The target is to verify whether the Tensor SOM can be used as a behavior selection algorithm in a futsal game. In this case the player we want to take some decision is that one who has the ball during the game action analyzed.
As a first step, the tensor inputs need to be specified. We decided to use three categories of inputs: agents, environments and behaviors (Figure 3).
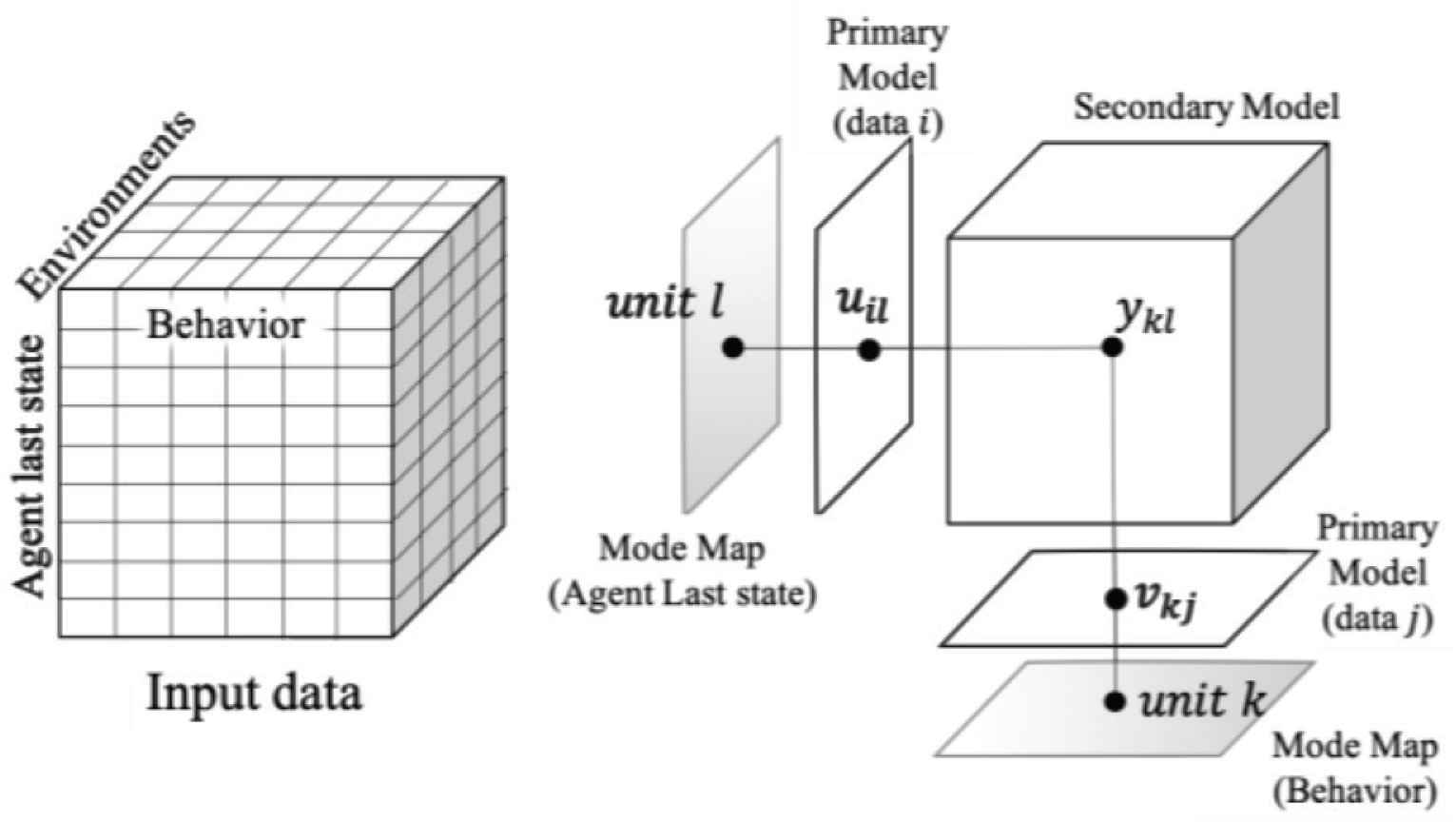
Image of input data.
The agent here is the target player, namely the player with the ball, and his current action, in movement (named run) or standing (named stop).
Environments consist of four situations:
- 1.
Press & Helper: around the target player there are both teammates and opponents.
- 2.
Nobody: the target player has no teammates nor opponents in his surroundings.
- 3.
Helper: around the target player there are only teammates.
- 4.
Press: around the target player there are only opponents.
Finally, the behaviors consist of four possible actions performed by the target player:
- 1.
Pass: the ball is passed to a teammate.
- 2.
Dribble: the player decides to continue running with the ball.
- 3.
Shoot: the player tries to score a goal.
- 4.
Kick out: the player decides to send the ball out of the field.
To each of this possible behavior is assigned a score from 1 to 4, based on the situation in the game (environments inputs), where 4 means best choice and 1 means worst choice.
In Figure 4, the inputs with the score for each behavior is shown, given a position of the player in the field and his current action, for example run. In this case, if nobody is in the surroundings of the target player, the best choice is to keep running with the ball, while kick out the ball would be the worst decision.
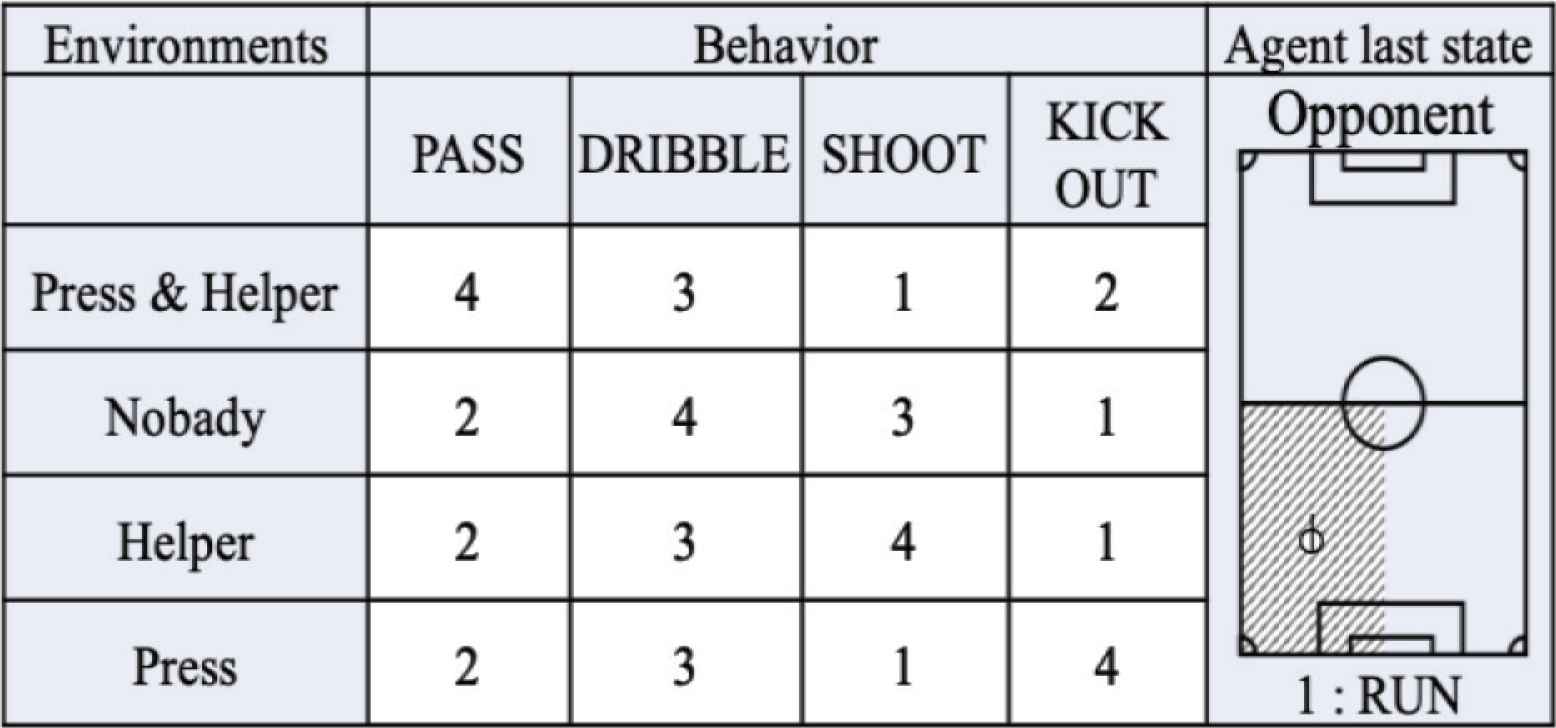
Structure of input data.
With the defined conditions we trained the algorithm. In Table 1 are shown the training parameters used.
| Number of iterations | n | 10 |
|---|---|---|
| Map size | 100 × 100 | |
| Max neighboring radius | σmax | 2.0 |
| Minimum neighboring radius | σmin | 0.2 |
| Number of learning | Epoch | 200 |
Training parameters using Tensor SOM
5.1. Experimental Results and Discussion
The results are analyzed by means of the Component Plane Matrix.
In Figure 5, it is shown the agent position and current action on the left, the four environments conditions on the right side and finally the matrix with the behaviors in the center.
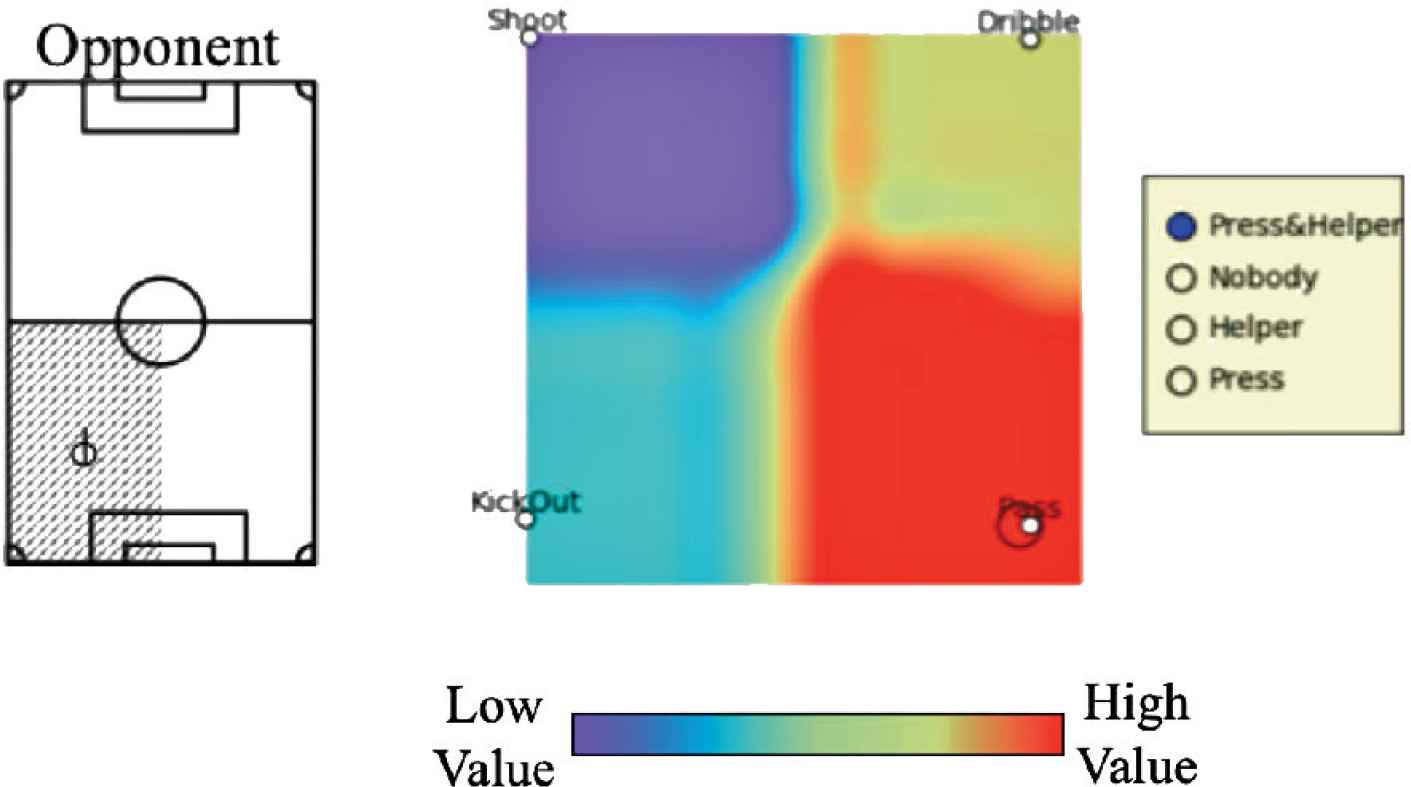
Result of Tensor SOM expressed by the Component Plane Matrix after learning.
We can see as the target player chose its behavior according to the decision criteria summarized in Figure 4.
In fact, in this situation he is running in his own field half, there are both teammates and opponents in his surroundings and his choice is to pass the ball (high value in the Component Plane Matrix).
6. CONCLUSION
In this paper, we created a behavior selection system for soccer robot players in a futsal game.
At first we developed an algorithm using Tensor SOM. This algorithm was selected because of its ability to deal with complex systems where several inputs are present. Also, it is suited for unsupervised learning.
These inputs consist of three categories: behaviors, agents and environments. Then we created a set of training data to train the network.
The results provided in the Component Plane Matrix are in agreement with the expectations and shows as this algorithm is able to select the predicted behavior. Given a position and current action of the target player and some specific situation in the game, he was able to choose the best action. Tensor SOM can be a powerful tool in the development of MAS, even though further tests and experiments in real conditions are required to evaluate its potential.
As a future work, this algorithm will be implemented on the real soccer robots used for RoboCup Middle Size League and tested in real conditions.
CONFLICTS OF INTEREST
The authors declare they have no conflicts of interest.
AUTHORS INTRODUCTION
Ms. Moeko Tominaga
 She received her M.S. degree from Department of Human Intelligence Systems, at Kyushu Institute of Technology, Japan, in 2018. She is pursuing the PhD at Kyushu Institute of Technology, Department of Life Science and Systems Engineering, under the supervision of Prof. Kazuo Ishii. Her research interests include symbiosis of humans and robots.
She received her M.S. degree from Department of Human Intelligence Systems, at Kyushu Institute of Technology, Japan, in 2018. She is pursuing the PhD at Kyushu Institute of Technology, Department of Life Science and Systems Engineering, under the supervision of Prof. Kazuo Ishii. Her research interests include symbiosis of humans and robots.
Dr. Yasunori Takemura
 He received PhD degree from Kyushu Institute of Technology, Japan in 2010 and now he is working as an Associate Professor at Nishinippon Institute of Technology, in Japan. His research area is about machine learning, data mining and robotics.
He received PhD degree from Kyushu Institute of Technology, Japan in 2010 and now he is working as an Associate Professor at Nishinippon Institute of Technology, in Japan. His research area is about machine learning, data mining and robotics.
Prof. Kazuo Ishii
 He received PhD degree from the Department of Naval Architecture and Ocean Engineering, University of Tokyo, Tokyo, Japan, in 1996. He is currently a Professor with the Department of Human Intelligences Systems, and the Director of the Center for Socio-Robotic Synthesis, Kyushu Institute of Technology, Kitakyushu, Japan. His research interests include underwater robots, agricultural robots, RoboCup soccer robots and intelligent systems.
He received PhD degree from the Department of Naval Architecture and Ocean Engineering, University of Tokyo, Tokyo, Japan, in 1996. He is currently a Professor with the Department of Human Intelligences Systems, and the Director of the Center for Socio-Robotic Synthesis, Kyushu Institute of Technology, Kitakyushu, Japan. His research interests include underwater robots, agricultural robots, RoboCup soccer robots and intelligent systems.
REFERENCES
Cite this article
TY - JOUR AU - Moeko Tominaga AU - Yasunori Takemura AU - Kazuo Ishii PY - 2020 DA - 2020/06/02 TI - Behavior Selection System for Human–Robot Cooperation using Tensor SOM JO - Journal of Robotics, Networking and Artificial Life SP - 81 EP - 85 VL - 7 IS - 2 SN - 2352-6386 UR - https://doi.org/10.2991/jrnal.k.200528.002 DO - 10.2991/jrnal.k.200528.002 ID - Tominaga2020 ER -